Witkin,
Baraff, and Kass, Physically Based Modelling,
SIGGRAPH 2001 Course Notes.
http://www.pixar.com/companyinfo/research/pbm2001/
Today
I'm going to continue with my overview of basic techniques in computer
animation so you can get some ideas about what topics you would like to
explore more deeply when we get to the paper presentations. Two of the
more important things to talk about are springs and collision detection.
Springs
Last
lecture we
talked about particle systems where the particles acted on their own,
unaffected by any other particles.
Much more sophisticated effects can be produced when particles are
linked together into 1D, 2D, and 3D matrices.
Hook's
law spring -
binary force between points a and b connected by a spring:
fa = force on a
fb = force on b
dx = position of a - position of b
r = rest length = | initial position of a - position of b |
ks = spring constant
kd = damping constant
dv = derivitive of dx with respect to time = va - vb
fa = -[ks * (|dx| - r) + kd * dv * dx / |dx| ] * dx / |dx|
fb
= - fa either they are both ends being forced apart, or
both being forced together
if the spring length is greater than the rest length then the particles are pulled closer together, if the string length is less than the rest length then the particles are pushed apart. The spring force is proportional to the difference between the current length of the spring and its rest length. The damping force is proportional to the difference in the velocity of the two particles
The
springs will try to get themselves back into the minimum energy state,
however the
masses at the
end of the springs may very well have other forces acting on them such
as gravity, wind, or more springs.
At
each timestep all of the current positions, velocities, masses,
accelerations are used to work out what the new positions, velocities,
masses and accelerations will be at the beginning of the next step.
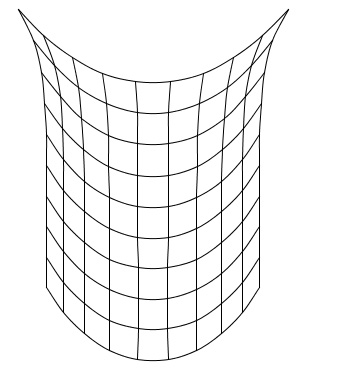
Good
for modelling
cloth, fluids , jello, and faces.
While
the springs are useful in keeping neighbouring points apart more work
is needed to keep the matrix from interpenetrating itself.
some
small spring exampls at http://www.myphysicslab.com/
and some nice different shaped ones at
http://www.jcraft.com/jspringies/jspringies.html
Nice
small cloth example at jrc313.com/processing/cloth/ This code is
slightly out of date for the current version of processing but only a
few lines need to be modified to get the source code working. I put a
fixed copy at Cloth3.pde
More on hook's law at http://en.wikipedia.org/wiki/Hooke's_law
Collisions
Lets say we have a ball dropping onto the floor ... we can assume that the floor doesn't move. If the ball is rigid then it keeps its shape through the collision - we can assume that the collision happens instantaneously and that the velocity vector of the ball changes instantaneously. If the ball is flexible then it will deform during the small but finite time of the collision.
If the collision happens instantaneously then the velocity changes instantaneously and that's very bad for the solver so we need to stop the solver work out the new velocities and then restart the solver.
We also have the problem of a ball sitting on a brick which is sitting on tthe floor. The ball should not fall unless the brick is pulled away.
Need to detect the collision
Need
to respond to
the collision
Start with the simple case of a particle and the floor
at time ti it is above the floor
at time ti+1 it is below the floor
so at some time tc the point collided with the floor.
It would be nice to rollback the simulation to time c, deal with the collision, and then start the simulation up again. The easy thing to do is just move the particle back up to just above the floor and deal with the collision. One typical method falling inbetween these two is to try and find the time when the particle is within some distance epsilon of the floor. Knowing that there was no collision at time ti but that there was a collision at time ti + h then try at ti + (h/2). Keep bisecting the search space until a time is found when the particle is within epsilon distance of the floor.
Now what if we have objects instead of particles. Lets say we have convex objects - if not we can break them up into a set of convex objects and proceed. We start by computing the bounding box of each object (side of the box parallel to the coordinate axis). Then we only need to look at objects whose bounding boxes overlap. This could still be a lot of work, so we want to re-use as much information from the last time-step as possible. As long as the time steps are 'reasonably' small, the objects in the simulation should not move 'a lot' during each frame - geometric coherence (remember coherence from CS 488?).
Witness - some piece of information that can be used to quickly answer yes or no to the question 'are polyhedra A and B disjoint'
Two polyhedra do not interpenetrate if and only if there exists a separating plane between them (not this is not true of concave objects)
A given plane is a separating plane if all of the vertices of A lie on one side of the plane and all the vertices of B lie on the other side.
First time the bounding box test fails we need to try and find a separating plane - do this by exhaustively going through the faces and edges of the polyhedra in question and finding the defining face or edges
- either plane contains a face of one of the polyhedra
- or plane contains an edge from one polyhedra and is parallel to an edge of the other polyhedra
Then we can keep using the defining face or edges in subsequent time steps where the bounding box test fails and verify that it is still valid
If this test fails then we try and find another defining face or edge.
If
we can not find
a new defining face or edge then we know that the polyhedra have
inter-penetrated. We can cache the vertex or edge that has
interpenetrated and roll back the simulation to see when the collision
occurred.
Simple collision example at http://www.myphysicslab.com/
Lots
of detail at
http://www.pixar.com/companyinfo/research/pbm2001/pdf/slidesh.pdf
A
very nice recent example of a structure breaking into particles is
the destruction of the tower of Barad-dur at the end of Return of the
King.
Now if you really want to make computer graphics look realistic then
the math starts to get much more complex but the results can be
extremely impressive. This research has some very nice videos showing
more modern / complex / realistic versions of the simple spring and
collision demos from above, and papers that go into detail about how it
was done:
http://graphics.stanford.edu/~fedkiw/
For more
modern
(complex) work on rigid body collision detection you can check out:
http://graphics.stanford.edu/~fedkiw/papers/stanford2005-09.pdf
and
here is another good paper of his on water:
http://graphics.stanford.edu/~irving/papers/irving2006_rle.pdf
and
if you have
more interest in fluid dynamics then you can find lots of info on
navier stokes equations which are used to find flow fields here:
http://www.navier-stokes.net/ and
http://en.wikipedia.org/wiki/Navier-Stokes_equations
Kinematics / Motion Tracking / People