SmartArt - AD405 - Drew Browning
Sensing Movement
Body position and movement – natural everyday interaction
Installations can take advantage of this by detecting position, orientation and movement.
Assessing the need
- Position – XYZ location
- Right hand rule – positive axis direction and rotation
- Orientation – XYZ rotation
- X/Y plane – front or top view
- Movement. – change in either position or orientation
- Velocity - how fast
- Absolute vs. relative – absolute coordinates or relative to last position
- Identity – distinguish between multiple objects moving
- Degrees Of Freedom (DOF) – XYZ position/orientation
- Range of sensitivity
- Minimum/maximum/angle
- Number of interactors
- Consider constraining the space rather than more, bigger, better tech
How Ranging Sensors Work
- Emitter/detector – energy sent out to target, amount returned is measured
- Transduction – the difference between amount sent and returned is transduced
- Energy – light, sound, magnetism
- Homebrew vs. commercial sensors – cost/time
Detecting Presence or Motion – whether in/out or position change in space
·
Digital input –
User presence not attention
- Foot switches – cover with rug/carpet
- Photoelectric switches – light beam make or break switch

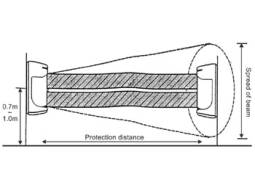
- Motion detectors – detects changes in infrared light within a space
- Magnetic switches

- sense position of objects semi-wirelessly
- magnetism makes or breaks the switch
- Hall effect sensors – read magnetic fields, digital or analog types

- Electronic
Windows – installation doc
- Burglar alarm tech – use off the shelf or hack commercial products
Determining Position – distance/direction in space
- Optical - IR Sensors – short range (1.5” – 56”), cheap
 photoresistor
photoresistor
 IR
emitter
IR
emitter
 IR
receiver
IR
receiver
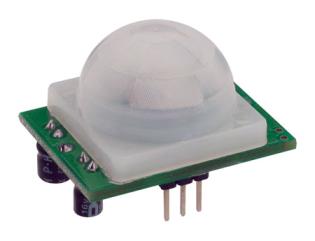 PIR
PIR
- Ultrasonic sensors – medium range (6” – 35’)
 MaxSonar-EZ1
MaxSonar-EZ1 Parallax
Ping sensor
Parallax
Ping sensor
- Hall Effect sensors – very short range (less than 1.5”)
- GPS – very long range (global – few meters)
 GPS Shield (http://www.ladyada.net/make/gpsshield/index.html)
GPS Shield (http://www.ladyada.net/make/gpsshield/index.html)- RFID
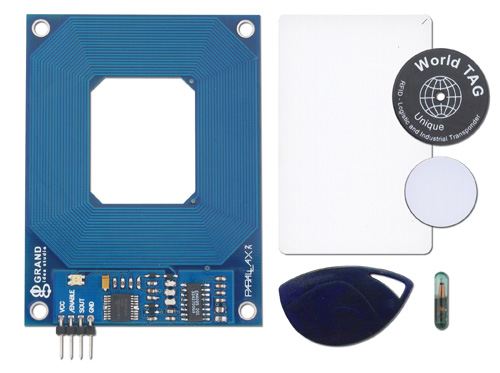 Parallax RFID
Parallax RFID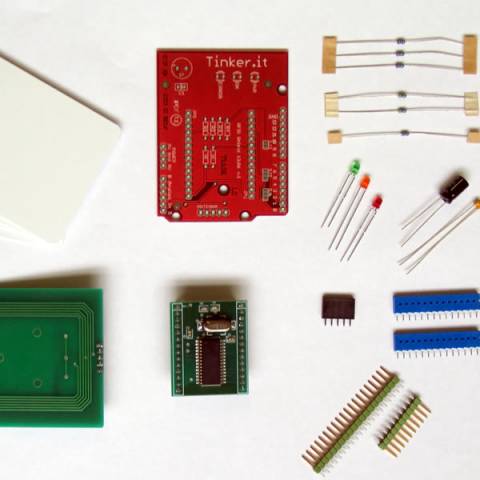 RFID shield-kit (http://tinker.it/now/2008/09/08/tinker-it-rfid-kit/)
RFID shield-kit (http://tinker.it/now/2008/09/08/tinker-it-rfid-kit/)
- Bluetootth
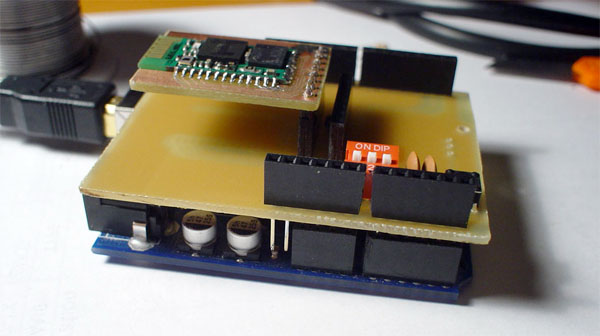 bluetooth-shield (http://blog.makezine.com/archive/2008/10/arduino_bluetooth_shield.html?CMP=OTC-0D6B48984890)
bluetooth-shield (http://blog.makezine.com/archive/2008/10/arduino_bluetooth_shield.html?CMP=OTC-0D6B48984890)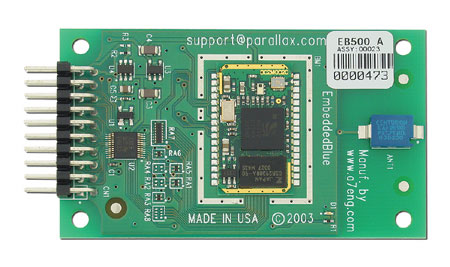 Parallax Bluetooth Module
Parallax Bluetooth Module
- WiFi
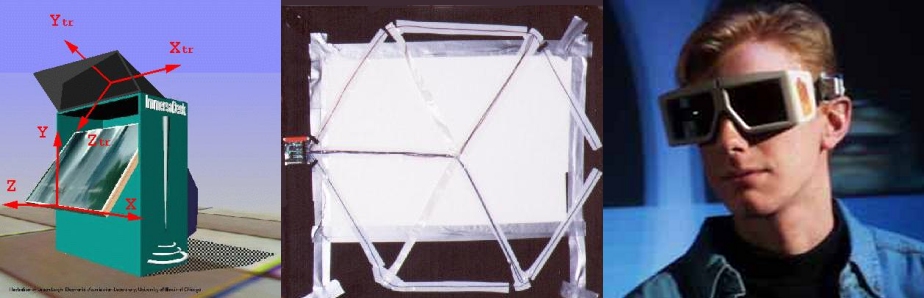
- 6DOF Tracking – magnetic, optical, ultrasonic, precise, medium range (10’ max)
- CWALL
tracker


Determining Rotation – orientation in space
- Potentiometers –
- mechanical rotation
- typical pot less than 360 degrees of rotation
- multi-turn and endless pots available
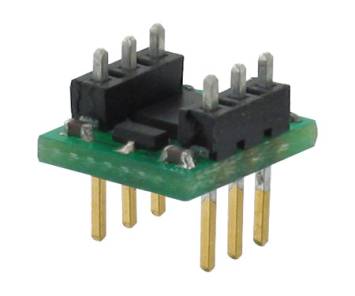
- Accelerometers –
 Tri-Axis
Tri-Axis Dual-Axis
Dual-Axis- change in speed or movement
- 2 or 3 axes
- cannot read vertical access rotation
- tilt relative to gravity
- 90 degrees of sensitivity
- Pan
– installation doc
- Compass – orientation relative to earth’s magnetic field, slow
- Slip Rings – power and communication to rotating objects (motor commutation, VCR)
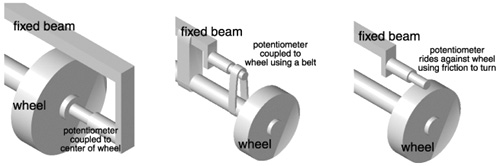
- Encoders – mechanical/optical sensor tech
- Encoder wheel with slots for IR emitter/detector
- Computer count pulses
- Mechanical mouse – x/y encoders
- Rhino robot example
Speed of Rotation
- Tachometer – RPM, bicycle tachs
- Gyroscopes - angular acceleration or change in rotation (gyro-mouse)
Video Tracking
- Video camera like array of thousands of photocells
- Lens to focus and scale the light
- Iris to control amount of light
- Separates light by color
- Computer vision
- Ability to track color – GEM: pix_blob
- Difficulties - changing light, noise, object recognition
- Humans can deal wit these issues effortlessly
- Constrain the environment to make the task easier
- Lighting
- bright, evenly lit space best for low noise
- infrared (IR) - best for motion tracking
- fluorescents - no IR
- incandescents and sun - give off IR
- Camera types
- webcams - USB and Firewire
- network cams - ethernet and composite
- DV cams
- manual controls good - iris, zoom
- Fast processor necessary - most microcontrollers too slow
Identity
- GEM: pix_multi-blob
- Barcode readers
- RFID – Radio Frequency Identification
- Magnetic card swipe