Lattice Deformations
And
Soft
Body Controls
Lattice creations
and parameters:
- Create lattice over “torso” geometry
only.
- Soft body implementations:
- select lattice
- go to options box of “create soft
body”
- activate “duplicate, make original
soft”
- activate “duplicate upstream graph”
- hide non-soft object
- make soft goal
Proceed and adjust
“goal PP” attributes after completion of soft body setup.
Importing Geometry
And
Character Setup
- Scale and group geometry objects for
the palm.
- Head objects must be group together
without “selection handles” (all
with eyes, ears, etc.).
- Xform translate (down) and rotate the
new group (cannot freeze transformation).
- Group every body part (geometry) and
perform appropriate Xform to fit new skeleton size (scale & rotate).
- “Freeze Transformation” is permitable
at this point.
The above steps
pertain to the file “FulgoreWalk.mb” after redesigning of the model and then
export only the geometry of the file “Fulgore_1.mb” or “Fulgore1”. In Fulgore_1.mb, delete everything below pelvis,
import only the geometry (mainly limbs) and then recreate the skeletons.
Arms/Palms Setup
(Binding
the geometry)
- Modify the position of the arm then
delete the “history” and “freeze transformation”.
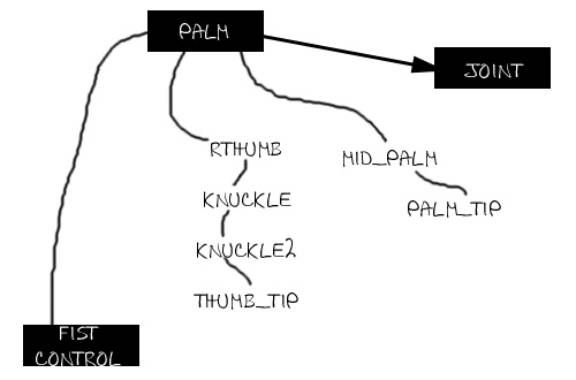
- Create skeleton (joints) for the palm
and thumb.
- Bind the “thumb” geometry to the thumb
joints.
- Position the arm skeleton to the “bind
pose”.
- Connect the palm joints to the wrist
joint with “parent” option engaged.
- Bind the arm to the arm joints.
- Connect the thumb joints to the wrist
joint.
Layout
of FD Lattice à
“palm”