Networked Scene Graph (NSG)
Overview
The task is to come up with a mechanism
that allows existing applications to run across a cluster of workstations. Each
node on the cluster runs its own copy of the application and data, rendering
only a specific view of the application. One of the nodes in designated the
master and the rest are slaves. The master handles any user-interaction and
propagates its scene graph changes to the slaves through the CAVERN dbserver.
The NSG API defines the protocol for this uni-directional communication. The
core of the API is kept independant of any particular scene-graph API. The communication
is characterized by command strings across the network. Eg a transformation
command string has the form "NSGTRANSFORM [nodeName] [matrix]". Other
commands could be added such as file loading, switch, sequences etc. Presently,
only the transformation and Cave Navigation command have been implemented.
I have used Limbo to test this API.
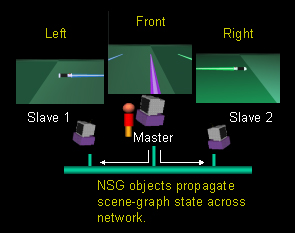
The diagram below shows a snapshot of the execution. In this example, the Master
renders the front wall while the Slaves 1 and 2 render the left and right wall
respectively. These are specified using the -wall command-line option defined
in CAVElib.
Class Diagrams
Here is the class diagram and description
of the classes implemented.
- NsgCmd
- Abstract class that encapsulates
a command. Each command has an identifier token string and methods to input/output
and execute itself. So, for each command(transform, switch etc ) we define,
we need to inherit from this class and override these virtual functions.
- NsgTransformCmd
- Encapsulates a transformation
command. Contains the transformation as a 16-float array and the associated
node-indentifier. It also overrides the base class functions to read/write/execute
itself.
- NsgCAVENavCmd
- This is the command responsible
for sharing CAVE Navigation transform between the nodes. The navigation is
stored as a 16-float array. This is just a temporary hack. The distributed
CAVElib should be used to share tracking/navigation.
- NsgCmdRegistry
- A Singleton object with a map
associating a command identifier with its implementation of NsgCmd. Eg the
command "NSGTRANSFORM" is mapped to NsgTransformCmd. The registry
has functions for lookup/registering commands. The NsgCmd's, on creation,
register themselves automatically with the registry.
- NsgCmdInterpreter
- Inherited from db Shared state.
Observes a CAVERNdb_client and is triggered by received network commands.
It used the first token of the received string to look up the respective NsgCmd
in the registry, and it then makes the command execute. It is also responsible
for placing commands on the network.
- NsgInterface
- Abstract class that has functions
that execute each NsgCmd. Every NsgCmd has an instance of this class. When
the NsgCmd is executed by the NsgCmdInterpreter, it calls the respective functions
in the NsgInterface. Eg the NsgTransformCmd would call the doTransform function.
Your application should implement this NsgInterface and override all the commands,
if not using NsgPfInterface.
- NsgPfInterface
- While all the classes so far have
been independant of any scene-graph API, this is the class that serves as
a bridge between a performer app and NSG. Using this class in your app shields
you from the rest of the NSG classes. You need to attach the pfNodes that
you want to share and call process every frame. Any updates to those nodes
will be synchronized
API Docs
Limbo example
This section explains the changes
made to limbo in order to use NSG. One instance acts as the master while the rest are slaves(which
is by default). To act as master, the line "MASTER" should be added
in the .lbo config file.
CAVERN_perfLimbo_c has a new member
- master which
is true
if this application instance acts as the master, false
if slave. This is read from the config
file.
This general purpose API obviates
the need for pfNetDCS. pfDCS should be used instead. You need to create an instance
of NsgPfInterface as shown below.
limboSaber_c.hxx
|
class limboSaber_c : public CAVERN_perfLimbo_c
{
<--snipped-->
bool master;
NsgPfInterface* nsg;
}
|
The nodes that need to be shared
need to be registered with nsg. In the case of Limbo, the 3 sabers, the wand
dcs and the CAVE Nav dcs are attached. At every frame. the process function
for NsgPfInterface is called. Since only the master handles any user-interaction,
that should also be checked for in the limboSaber_c::process.
limboSaber_c.cxx
|
void limboSaber_c::init( int argc, char** argv )
{
<-- snipped -->
nsg = new NsgPfInterface(modelClient,"Limbodb","nsg");
nsg->attachNode(saber1);
nsg->attachNode(saber2);
nsg->attachNode(saber3);
nsg->attachNode(mainWandDCS);
nsg->attachCAVENav(mainNavDCS);
}
void limboSaber_c::process()
{
// Give it a few cycles to stop messages from queueing up.
for(int i = 0; i < 5; i++) modelClient->process();
if (master) {
CAVERN_perfLimbo_c::process();
picker->process();
nsg->process();
}
}
|
TODO's
- Instead of having to add all the
nodes to be shared, only the scene should be registered . On process, NsgPfInterface
should traverse the scene and depending on the pfNode types use the appropriate
NsgCmd's for transmission across the network. The nomenclature
we discussed earlier will be used to identify the nodes.
- Currently, I use the CAVElib option
-wall to specify the wall each instance should render. Should be able to specify
no of rendering nodes and arbitrary wall/viewport dimensions for each node
in the config file.
- Integration with distributed CAVElib
to share tracking and navigation.
- Address collaboration between
applications and latejoiners
Download
Coming soon...
Shalini 6/11/2001