
DarkSky Halos: Use-Based Exploration of Dark Matter Formation Data in a Hybrid Immersive Virtual Environment
March 4th, 2019
Categories: Applications, Visualization, VR
Authors
Hanula, P., Piekutowski, K., Aguilera, J., Marai, G.E.About
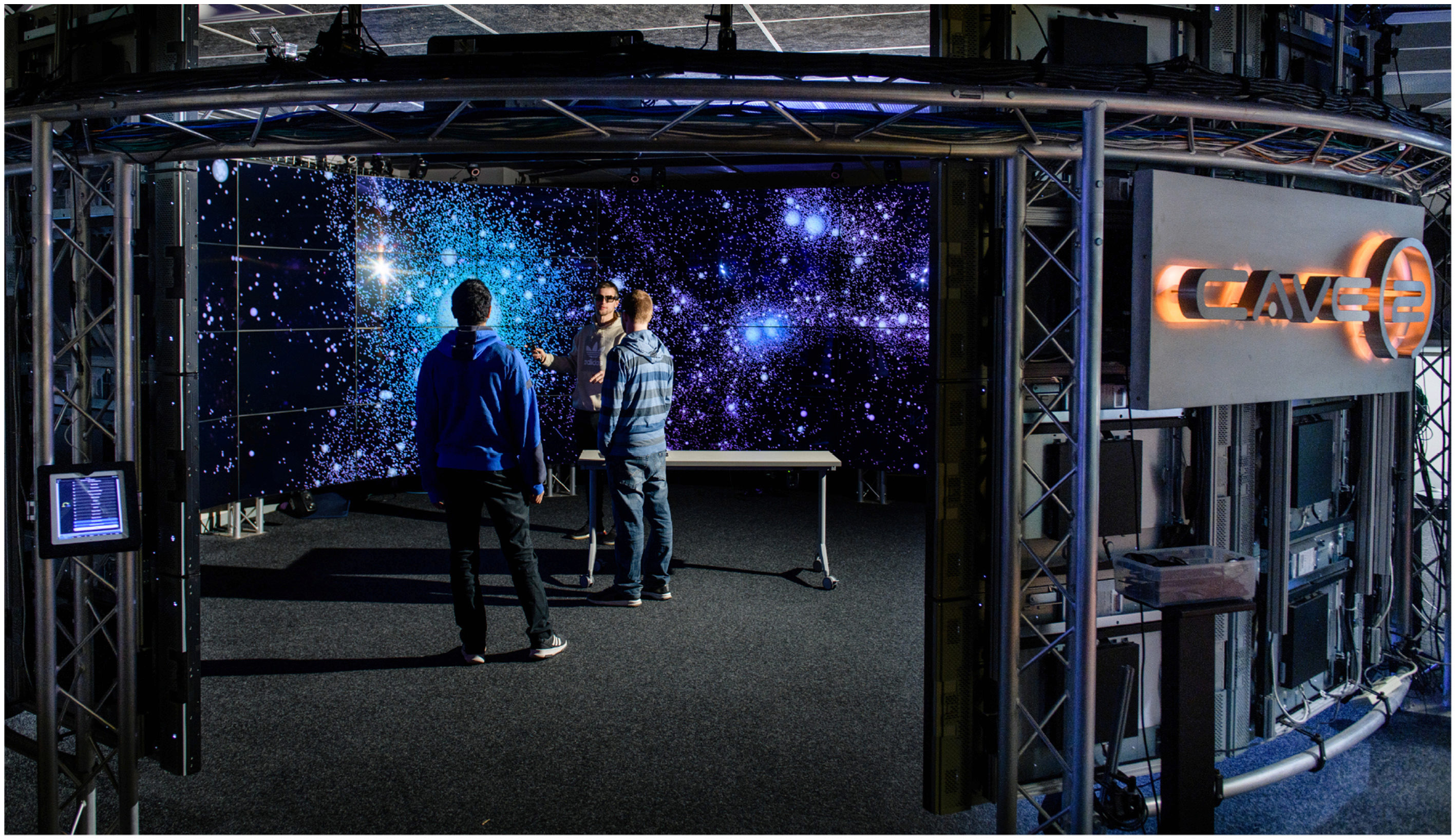
Hybrid virtual reality environments allow analysts to choose how much of the screen real estate they want to use for Virtual Reality (VR) immersion, and how much they want to use for displaying different types of 2D data. We present the use-based design and evaluation of an immersive visual analytics application for cosmological data that uses such a 2D/3D hybrid environment. The application is a first-in-kind immersive instantiation of the Activity-Centered-Design theoretical paradigm, as well as a first documented immersive instantiation of a details-first paradigm based on scientific workflow theory. Based on a rigorous analysis of the user activities and on a details-first paradigm, the application was designed to allow multiple domain experts to interactively analyze visual representations of spatial (3D) and nonspatial (2D) cosmology data pertaining to dark matter formation. These hybrid data are represented at multiple spatiotemporal scales as time-aligned merger trees, pixel-based heatmaps, GPU-accelerated point clouds and geometric primitives, which can further be animated according to simulation data and played back for analysis. We have demonstrated this multi-scale application to several groups of lay users and domain experts, as well as to two senior domain experts from the Adler Planetarium, who have significant experience in immersive environments. Their collective feedback shows that this hybrid, immersive application can assist researchers in the interactive visual analysis of large-scale cosmological simulation data while overcoming navigation limitations of desktop visualizations.
Keywords: immersive analytics, virtual reality environments, hybrid environments, astronomy, data visualization
Funding: NSF CAREER IIS-1541277, NSF CNS-1625941, CRA-W REU
Resources
URL
Citation
Hanula, P., Piekutowski, K., Aguilera, J., Marai, G.E., DarkSky Halos: Use-Based Exploration of Dark Matter Formation Data in a Hybrid Immersive Virtual Environment, Virtual Environments, Frontiers in Robotics and AI, vol 6, no 11, March 4th, 2019. https://doi.org/10.3389/frobt.2019.00011