
BendyBots
August 16th, 2007 - May 15th, 2008
Categories: MFA Thesis, Multimedia
About
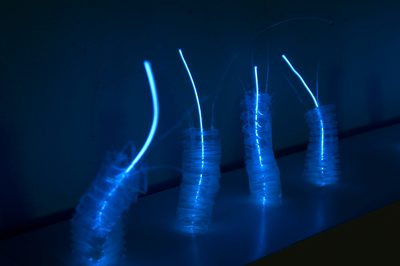
BendyBots are a series of twenty animatronic creatures. The project is an imaginative daydream about what future mergers of technology and nature could produce. The robots were inspired by oceanic plant life.
Each robot was on a Flexinol mechanism. I chose to echo the feel of an ocean by incorporating glowing blue electroluminescent wires into the center of the robots’ worm-like bodies.
The robots sit on a white rectangular shelf, constantly swaying from right to left, as though an unseen current was moving them. I designed small mechanics for each BendyBot.
The mechanisms are constructed to have one static resistance arm and two active arms that could pull independently of each other, while still being on one removable unit.
The project is designed to be easily accessible to have the mechanisms replaced, while still being light enough to affordably ship across the country.
The entire project was created from easily accessible materials. The housing was carefully constructed from white foamcore. Each BendyBot is comprised of two halves, the publicly visible “bots” and the internal mechanisms driving the “bots”.
The publicly visible part was created from strips of clear plastic and then folded, accordion style, for the body with three pieces of fishing line run up along the edges. A single piece of electroluminescent wire runs up the center of the body.
The internal mechanisms were created out of a small piece of Plexiglas and foamcore for the arms with metal screws and Flexinol wire. Instead of using noisy micro servos motors, I found a silent heat-activated wire to be a better choice. Muscle wire (aka - Nitinol / Flexinol wire) is a metal material which uses the heat of an electrical impulse to contract the metal. Nitinol belongs to a class of materials called Shaped Memory Alloys (SMA). SMA’s have interesting mechanical properties (Nitinol, 2007).
SMA metals have been a popular material in bio-mechanical design and engineering. Nitinol’s physical function resembles biological muscle; when activated it contracts. To activate Nitinol it is heated above its transition temperature (typically 70C). An electric current may be passed through the wire to heat it electrically. As the material cools it can be stretched back it its original length (Nitinol, 2007).
The most problematic part of making these mechanisms was trying to get the flexinol wire to stay connected between the fishing line and the electrically charged screws.
Since the flexinol wire is thin and cannot be soldered to metal connectors because of low heat tolerance, it was very difficult finding a solution. That solution was using hot glue to attach the muscle wire to small solid core wire pieces and finally soldering current carrying wire to those small connector wires. In my application of the muscle wire, the wire takes on a spring like behavior.
A Wiring micro-controller board sends out electrical impulses. These impulses are sent in one second intervals. The electrical impulse sent out is limited to 2 volts; however, my flexinol wires needed 4.5 volts to contract. I created a supplementary electronic component board.
This extra board had 40 reed relays on it and each reed relay acted as a switch. The wiring board’s 2 volts would trigger the reed relays to open and allow 4.5 volts to activate the muscle wires which started the mechanisms.
Since only one arm would be active, the other arm would be resting and the static resistance arm would become counter-springs. When the flexinol wire started to cool the other straight arms would slowly pull the active arm upright or back to an at rest position. Simple programming code controlled all of the robots’ movements.
Programming code was created in collaboration with, EVL Phd candidate, Ratko Jagodic.