



Lake Bonney Expedition 2008

The first deployment is under way.
Here are the third week's blog entries from Vickie Siegel.
For the most recent entries see the bonney 08
blog
Going through the launch checklist, Bill inspects the o-rings before sealing up the radio beacon battery compartment

Maciek returns to the Bot House with one of the obstacles we have been avoiding near the limno hut, an ablation stake that has ablated out of the ice. It may be an object like this that snagged us a few days ago
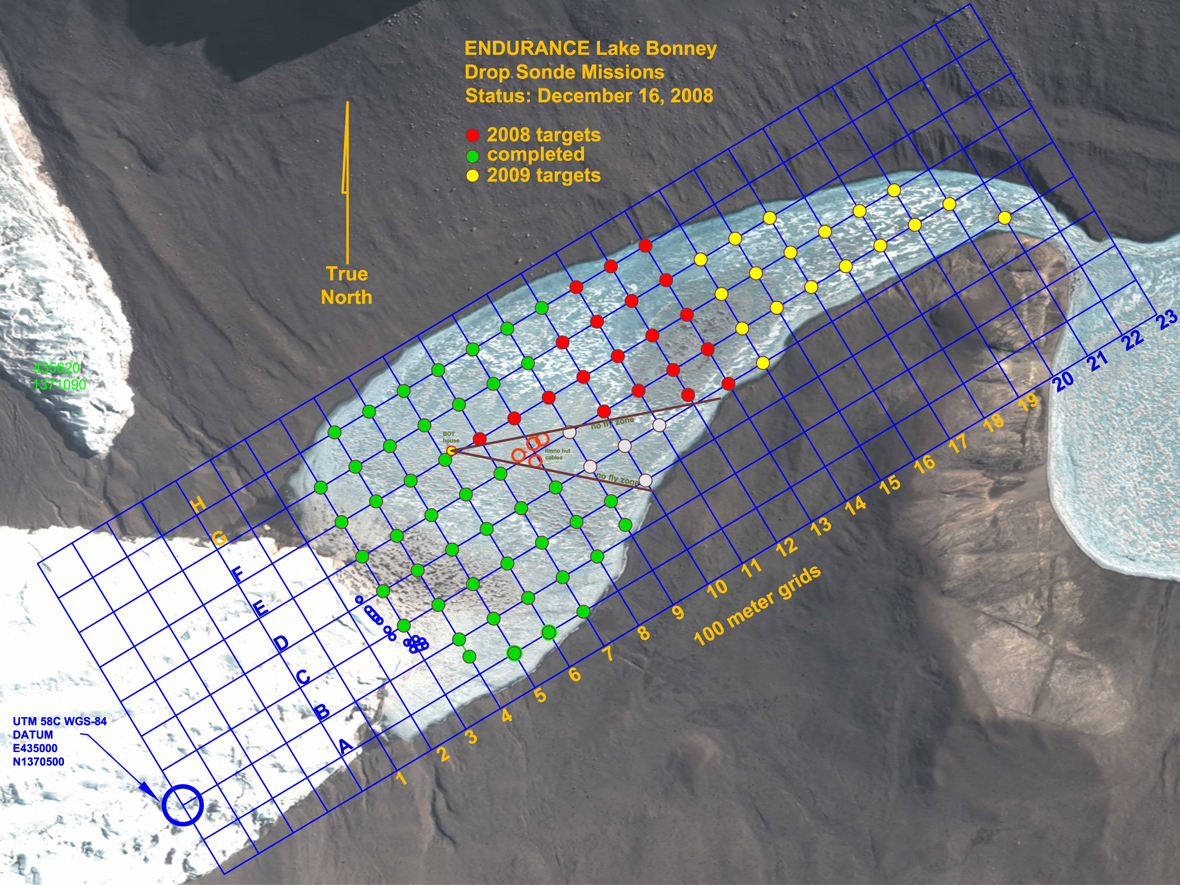
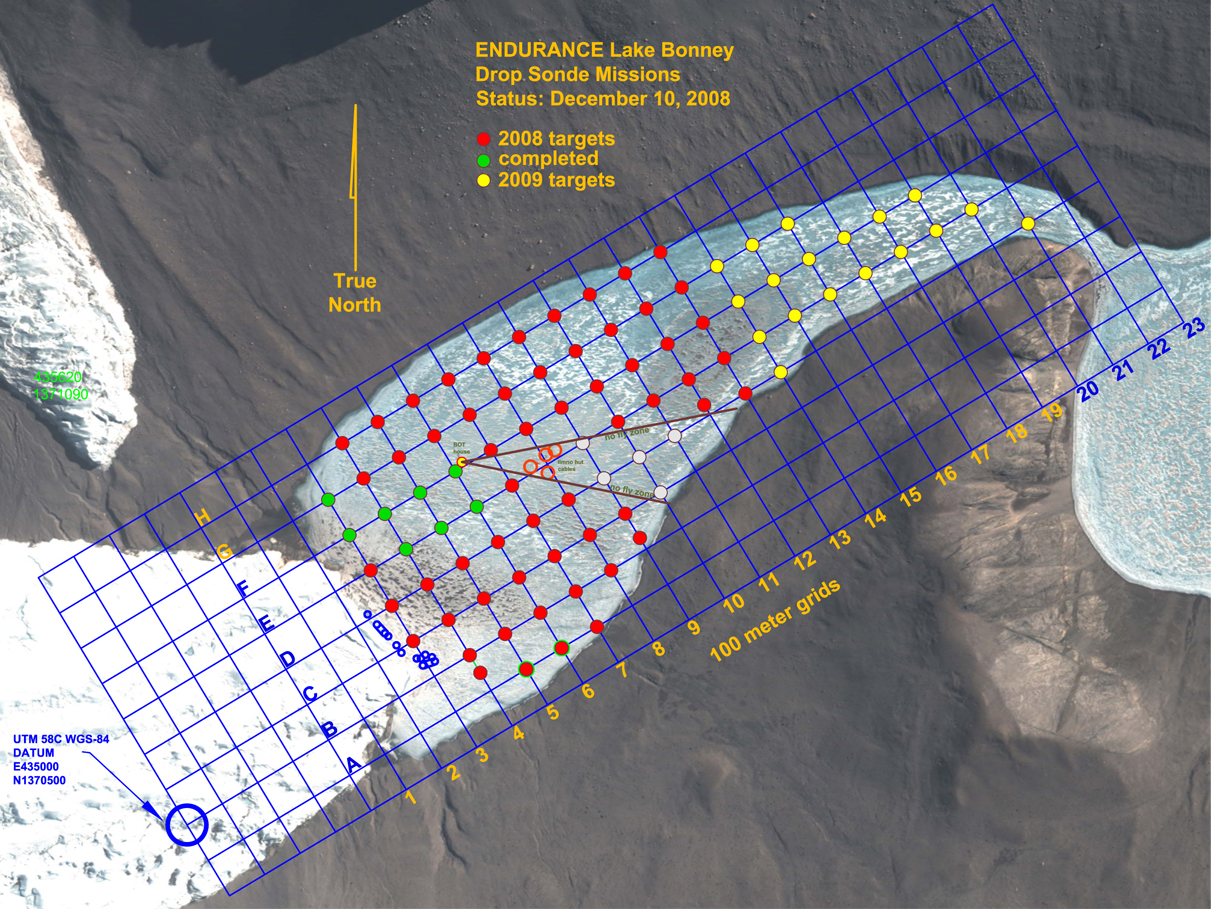
Our status at the end of Mission 5
Thursday
December 16, 2008
Today’s profiler mission, Mission 5, took us towards the lake shore
south of the Bot House. Our aim was to fill in the gap between
where we had gone on Mission 3 and our keep out zone. The keep
out zone is the area around John’s limnology tent, where we know there
are active experiments hanging down into the water. To avoid
entangling the bot or disturbing the experiments with either the bot or
the fiber, we’ve had to designate a wedge of the lake as a keep
out. Unfortunately this wedge means that there are a few grid
points that we won’t be able to get to, even though they are within our
range.
We ran through our launch checklist and dropped the bot in the
water. The weather was much nicer today and the mission went
quickly and cleanly. There was some worry that, even with our
conservative stand-off distance from the limno tent keep out area, we
might snag something under the ice on our way back to the Bot House,
but Leah reported that the fiber was feeding back in as it should and
the bot came home without incident.
Later that day, Maciek returned to the Bot House carrying a long
pipe. He had spent the afternoon working around the limno tent
and had encountered one of the experiments that defined a part of our
keep out zone, an ablation stake. It had ablated out of its spot
in the ice and was lying on the surface, so he removed it. While
there are still experiments to avoid in the keep out zone, it is nice
to know that there is one less object in the lake to trip us up.
Today the sonde camera recorded this image, among others, of microbial growths on rocks at 10 meter’s depth
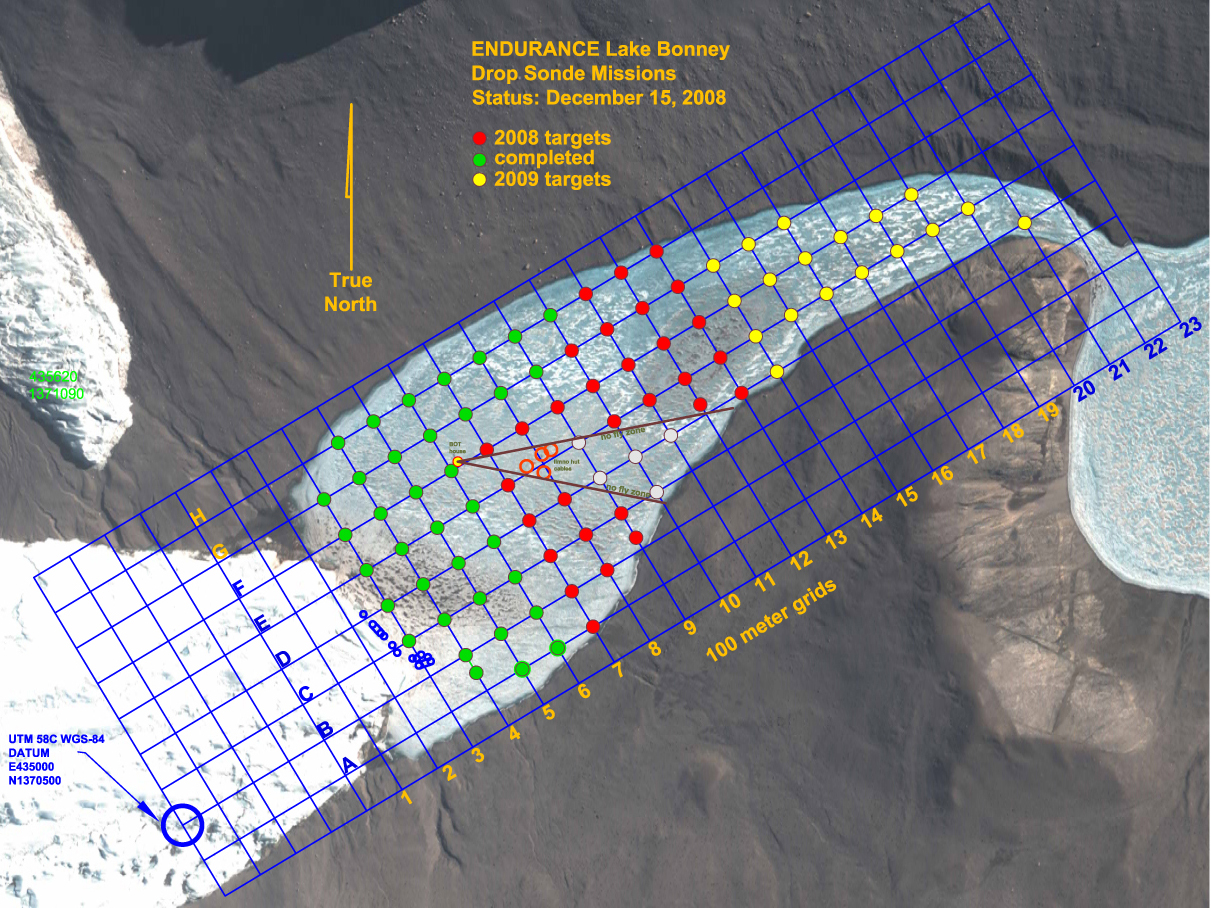
Our status at the end of Mission 4
Thursday
December 15, 2008
This morning was deceptively warm and sunny. As soon as we got
out to the bot house and started mission four, wind kicked up and the
temperature dropped. Both the team at mission control and the
team out tracking the bot had a chilly day. We had a few nervous
moments where the communications link between mission control and the
bot dropped out due to a kink in the fiber as it spooled out of the bot
house but otherwise it was a textbook mission. In terms of the
number of points hit, mission four was our most productive so far, with
13 new data points. We ran parallel to the north shore of the
lake and got some exciting photos of the lake bottom.
We pulled the bot back into the Bot House at the end of the mission and
put it on charge. Originally our plan today had been to run two
missions but the tracking team was chilled and tired and we decided
that the day would just run too long by the time we had recharged the
batteries so we headed off to dinner.
Thursday
December 14, 2008
Now that we’ve completed three successful sonde missions, we took today
off. We have been working 12 to 14 hours days out here and now
that things are going well, it is time to rest. We stayed up late
last night watching a Bruce Lee flick, so most folks slept in a bit and
then we all went to Lake Bonney Camp to lounge about in the
Jamesway. Leah baked cookies, since there is an oven at the camp,
and we each had the chance to take a shower of sorts by using a solar
shower bag filled with water we heated on the stove.

Our smiling assistant Leah from the BFC has come to help us stay sane. Good luck!
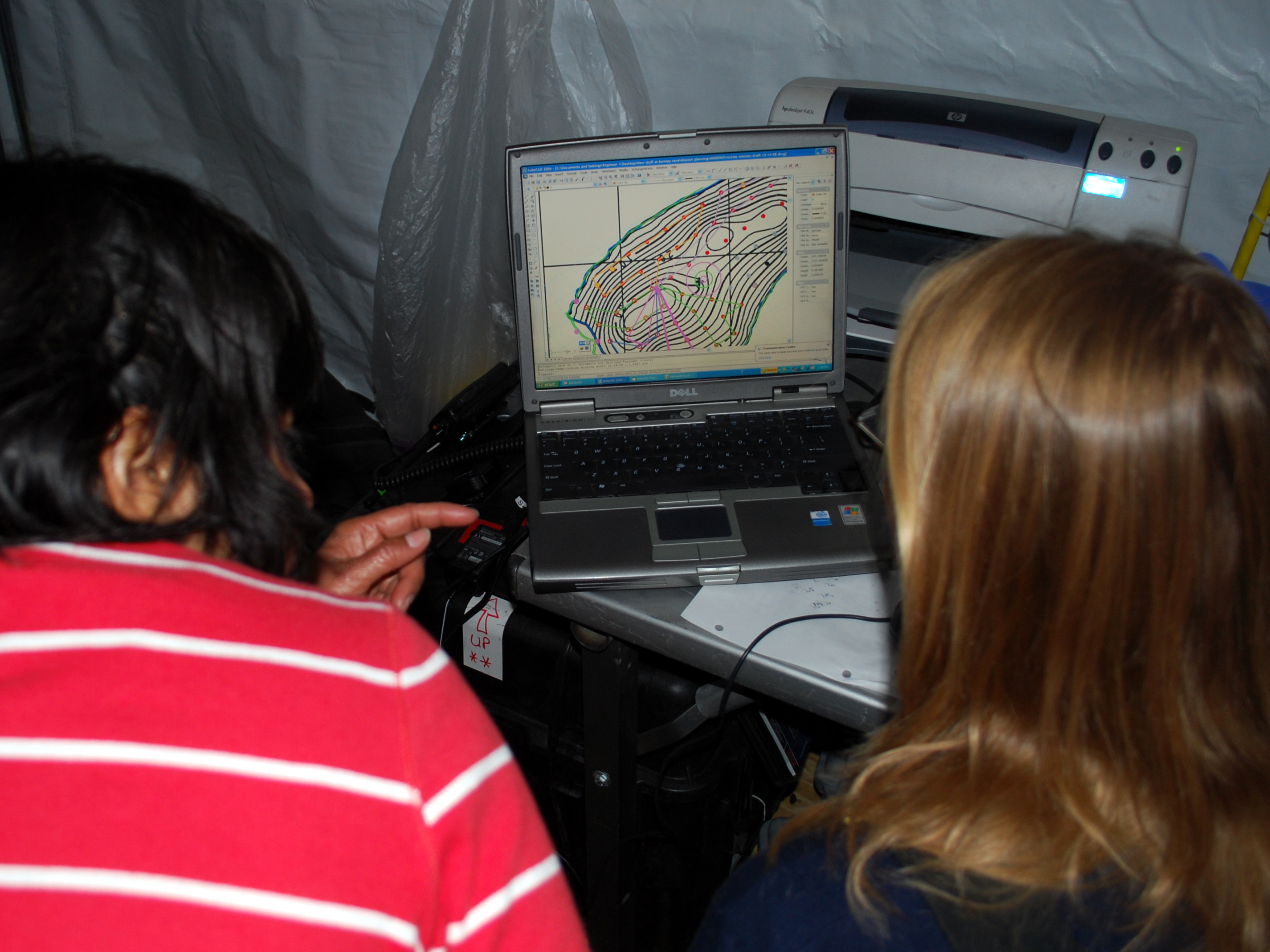
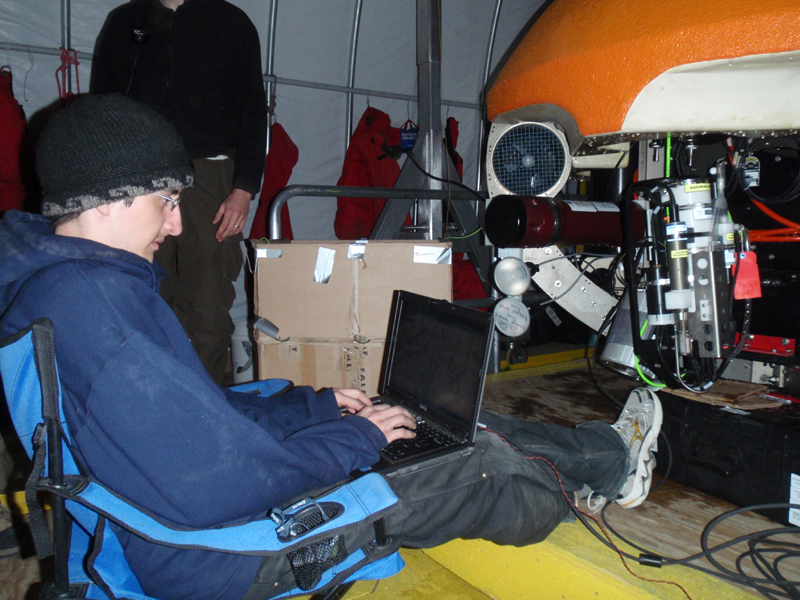
Shilpa and Vickie plan the upcoming mission. Mission planning is the balancing act of connecting the dots to hit as many points as possible without running out of battery power
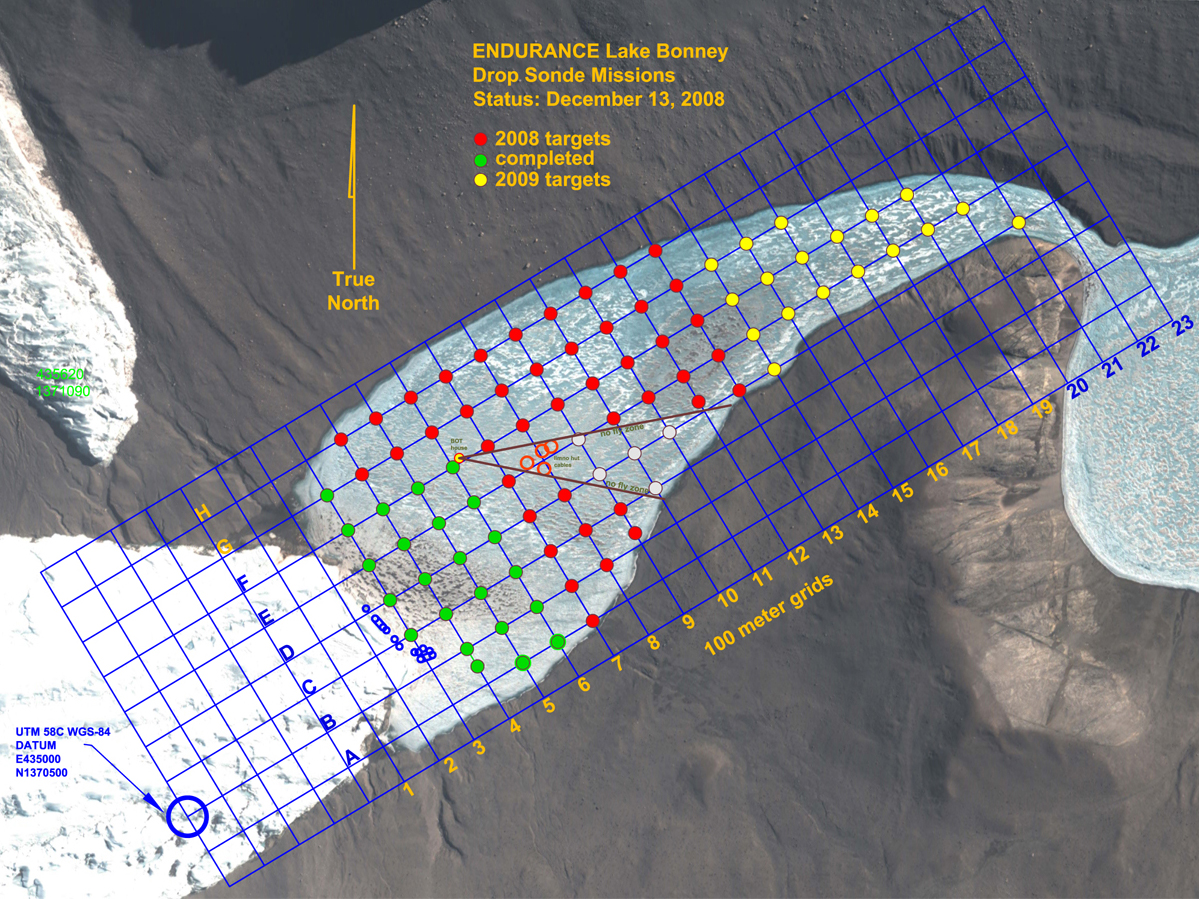
Our status at the end of Mission 3
Thursday
December 13, 2008
Today we had a couple of changes in crew. We got a new helper,
Leah, from the Berg Field Center in McMurdo to keep us sane and Peter
and Bart left in the afternoon for McMurdo. Since Bart had been
the only person designing mission plans for the bot each day, he took
some time in the morning to show Bill and Vickie how to design a
mission plan and then check whether the mission length and number of
sonde drop points planned was within the bounds of our battery
power. After the coordinates for the mission plan were extracted
from the planning map and Shilpa programmed them into the bot, we were
ready to get in the water.
Today’s sonde mission took us to the southwest edge of the lake.
We were able to get the bot much closer to the shore than we had
predicted. We hit 9 points today, including the points we had to
skip from yesterday’s truncated mission. We continue to rack up
data.
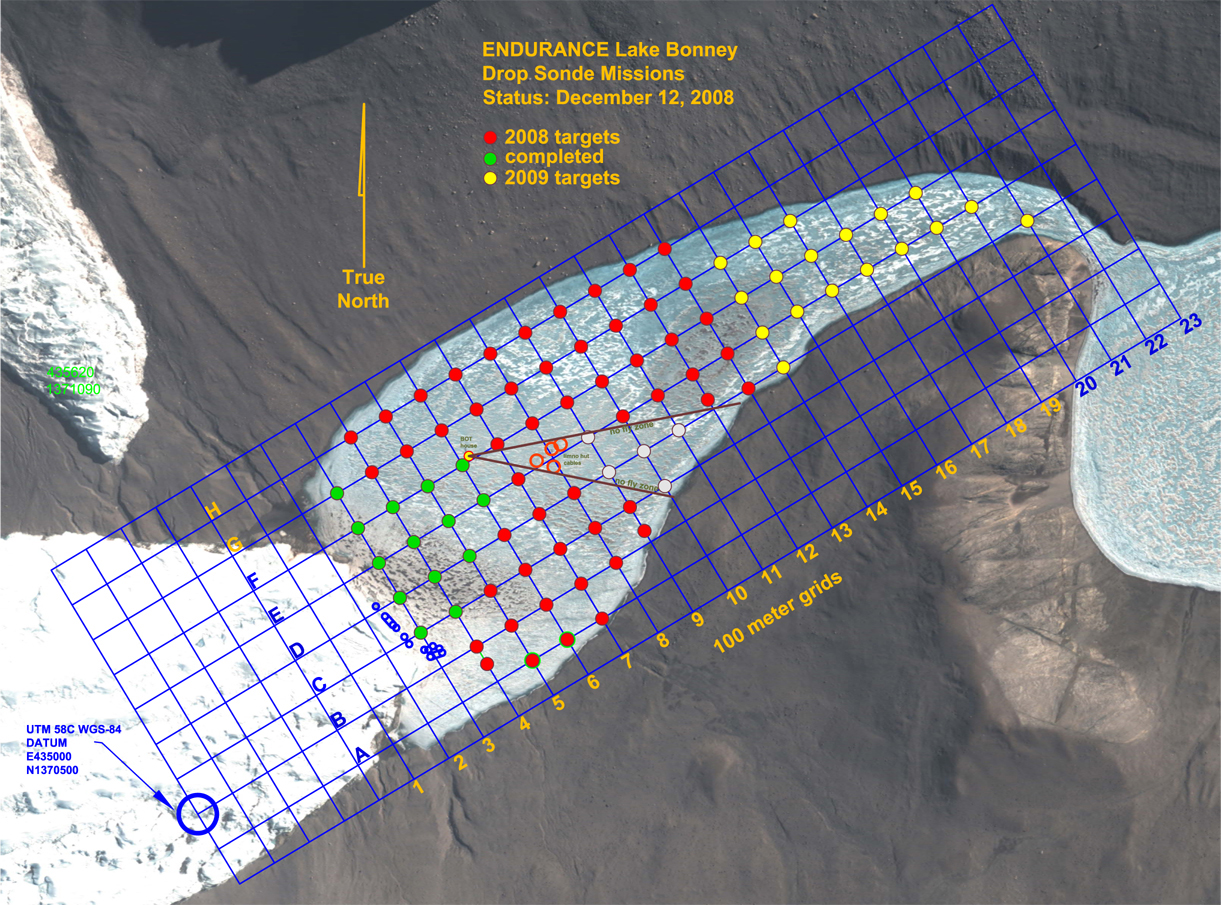
Our status at the end of Mission 2
Thursday
December 12, 2008
We were back to work as usual this morning. We planned a mission
the southwest end of the lake, around the same area we navigated to on
our first long run. Launch went smoothly; we are really getting
the hang of our routine here now. Bill and Vickie tracked the bot
on the surface and the folks in mission control watched as the bot
navigated from point to point. A little over halfway through the
mission, though, mission control radioed a message to the tracking
team, “We seem to have the fiber snagged on something. We’re
going to stop here and dive a little, see if we can get the fiber free.”
In order to get as many points covered as possible per mission, the
missions are planned to be long narrow loops, usually working up one
row of grid points and down the next row. Somewhere in this loop,
we had wrapped the fiber around something sticking out of the ice
ceiling. Now, even though the bot was heading closer to home, the
fiber in the bot house was still spooling out, instead of going slack
to be pulled back in.
After the dive, mission control let the bot continue its planned route
and hit one or two more grid points. When the fiber continued to
feed out, even as the bot approached closer and closer to home, we
decided to cut a few points off of the end of the mission and head
straight home. Since we have a 1000 m long string of fiber, we
had enough line to bring the bot home, even with the fiber wrapped on
some mystery obstacle several hundreds of meters away.
With the bot safely home and the fiber optic still wrapped around
something out in the lake, the debate began about how to proceed.
Some people wanted to recharge the bot’s batteries and go back down
and, using the upward and horizontal cameras, follow the fiber back to
find whatever it was caught on. Others wanted to detach the fiber
from the bot and just pull it through by hand. By pulling on both
ends of the line, the outgoing and the incoming we could feel that the
line was wrapped around something smooth because there was not much
resistance to tugging in either direction. In the end we decided
that while finding and identifying the snag object would be useful for
future missions, it was too risky to take the bot back out to
investigate while the line was tangled—it might just make the problem
worse. Instead, we decided to pull it through. We taped a
small piece of foam to the metal connector on the end of the fiber so
that it, like the rest of the fiber would float on the ice
ceiling. We tossed the connector into the water and began to pull
on the other end of the line. Everyone watched with anticipation
as Bill pulled the line and fed it onto the deck as it came up.
We all wondered if the connector would get stuck in the snag point,
should we have cut the connector off? After a few minutes of
pulling line in, Bill reported that there was suddenly much less
resistance in the line, the connector must have made it around the
snag. It was several minutes more before the end of the line made
it back to the bot house. What a relief to get out of that
mess. Although we still don’t know what we got caught on—an old
experiment or an imperfection in the ice surface--we had the foresight
to mark the cable before pulling it through, so now we know how far
away the snag was, and in what approximate direction. Even though
we had to cut the mission short, we still got 7 data points today.
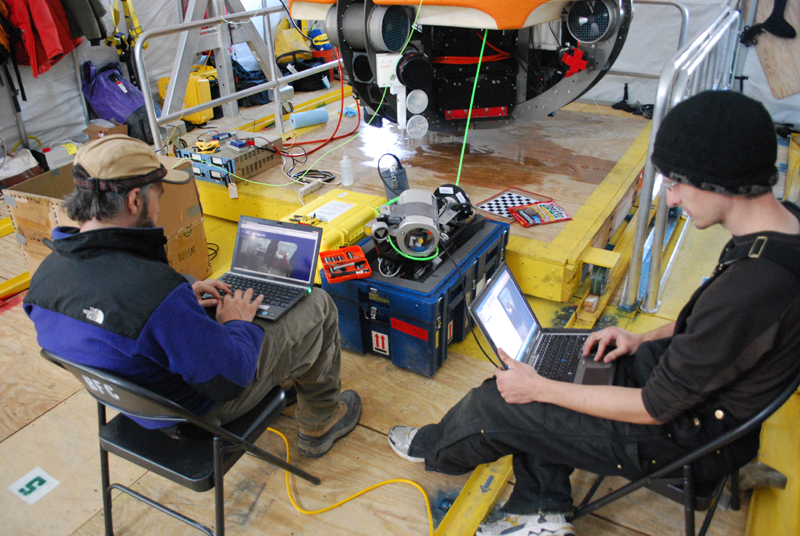
Bart and Chris work on focusing the sonde camera
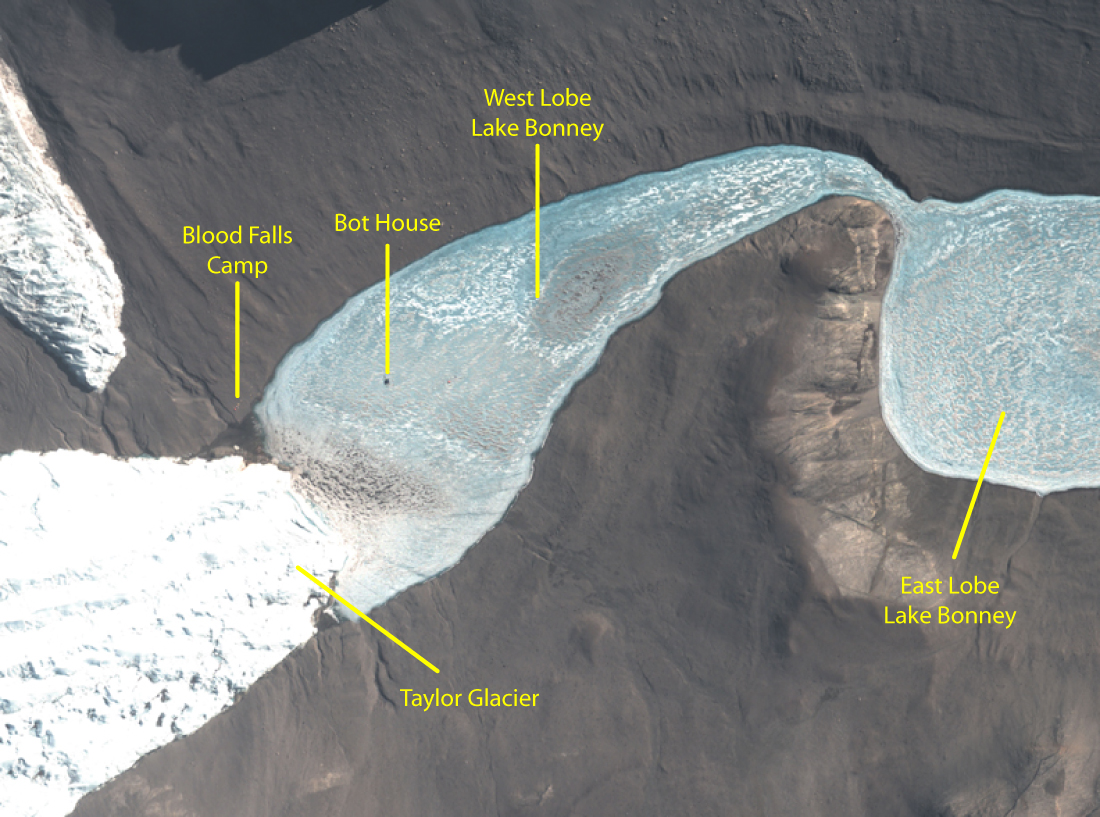
A Quickbird satellite image taken recently shows our camp and Bot House on West Lobe Lake Bonney
Thursday
December 11, 2008
Our successful sonde mission yesterday had us convinced that we were
over the hump and would just be running uneventful missions from here
on out. Chris, Bart and Kristof took some time in the morning to
change the lens and adjust the focus on the sonde camera, so that our
images of the lake floor would be crisp.
Once they were done, we sent the bot out on its mission for today, nine
sonde drops. At the first grid point, we began to lower the sonde
but less than halfway down the drop the data coming from the altimeter
turned to garbage. The altimeter sits near the bottom of the
sonde and tells us how far the sonde is from the bottom as it is slowly
lowered. For environmental and hardware reasons, we want to avoid
letting the sonde bump into the lake bottom. Normally the sonde
is lowered until the altimeter indicates that it is 1 meter above the
bottom. Without good data from the altimeter it is difficult to
know when to stop the sonde drop and there is really no way to continue
the science mission from that point, so we aborted the mission and
called the bot home. Strangely, the altimeter resumed normal
operation somewhere on the trip home.
Back in the bot house we started to work on the problem. We
pulled the bot out of the water and, thinking that the garbage data
might have been caused by a poor communications connection somewhere
between the altimeter and mission control, we started to check the
altimeter’s connections in the electronics housing in the sonde.
Everything seemed fine, and anyhow, the altimeter now seemed to be
working. We spent some time dropping the sonde in and out of the
water and correlating the altimeter readings to the encoder on the
spooler. Coupled with a depth-under-keel measurement from the
sonar units, this gives us an additional way to know how far the sonde
has been spooled out and how much distance is left as it approaches the
bottom. Assuming that we don’t see anymore problems from the
altimeter, tomorrow we’ll be back to running missions.
John adjusts the transponder

Peter marks the location of our first data point!
Chris downloads our first lake data from the Seabird instruments at the end of the day

Vickie prepares the flags that will be used to mark the locations of the sonde casts
Our status at the end of the first profiler mission
Wednesday
December 10, 2008
Back in business with our repaired profiler, today
we
planned our first drop sonde mission. With Bill and Vickie
waiting outside to track the bot from the ice surface with the loop
antennas, the crew at mission control sent the bot under the ice on its
first real data collection mission. We were done with all of our
preliminary check-out tests and now its time to do some science.
The idea of the drop sonde missions is this: We have made up an
imaginary grid over the whole lake. The lines of grid are spaced
apart by 100 meters in the x direction and 100 meters in the y
direction. Every spot where two grid lines cross is a point where
we want to get water chemistry measurements. To get these, the
bot navigates at a depth of 1 meter below the ice ceiling to a grid
point in its mission plan. When it reaches the point it floats up
until the four feet at the top of the bot rest against the ice, a
maneuver we call ice - picking. Once the bot is ice - picked, it is
stable and begins to lower the sonde. The instruments on the
sonde take measurements of the water chemistry and so on as the sonde
reels out. The sonde stops lowering at a distance of 1 meter from
the bottom, takes a photo of the bottom and then the sonde reels back
up. While the bot is ice-picked and dropping the sonde, Bill and
Vickie locate the bot’s position from the surface and mark the spot
with a flag. At the end of the day, Maciek uses a GPS to get a
coordinate for each flag. We can compare these coordinates
showing where the vehicle has actually traveled to where the computer’s
mission log says it has traveled. This is a double check for our
navigation and assures Peter and John that we have an exact an accurate
location for the instrument measurements we’ve taken.
For our first data run, everything went incredibly smoothly.
Bill, Peter and Vickie tracked the bot on the surface and watched as
the flags marking the grid points lined up in 100 meter
intervals. The folks at mission control found that things were
going so well that we still had enough battery power to do an extra
point on the way home. This gave us a total of 8 sonde casts for
the day, a very satisfying start to our scientific work at the lake.
On the bot’s way back to the melt hole after the sonde casts, Kristof
took the opportunity to troubleshoot some problems he had been having
with the USBL. The USBL is one of the bot’s navigation tools and
there are two parts to it, the large transceiver is mounted to the
vehicle and the 30 cm long transponder hangs down in the melt
hole. It is kind of like a homing beacon: transponder sends out a
signal, the transceiver picks up that signal and can then calculate the
distance and bearing to the transponder. It feeds that bearing
and distance to the bot and the bot uses it to help navigate
home. For the past few days we had not been able to get it to
work, the transceiver was not receiving the transponder’s signal, but
after some experimentation today, we found the best depth for the
transponder to hang at and now that system is working.
Blog entries from previous weeks
can be found below:
Week 1 - Nov 26, 2008 - December 2, 2008
Week 2 - Dec 3, 2008 - December 9, 2008