



Lake Bonney Expedition 2009
The second deployment has been successfully completed.
Full details are available at the
Stone Aerospace ENDURANCE 2009 Blog.
You can learn more about current events from Kristof Richmond at
Kristof's blog
and from Emma Steger at Emma's
blog and from Shilpa Gulati at
Shilpa's blog.

Sunshine and no wind can sometimes make life outside our remote lab seem pleasant.
Vickie gears up for GPS tracking of the vehicle at the conclusion of the navigation calibration tests. The differences between the actual locations reached yesterday and the originally targeted locations were used to create an adjustment matrix which compensated for any instrumental scaling and rotation errors.

Pressure ridge remnants near Taylor glacier pop up from the ice cap - underneath, we suspect cracks and bulges that snag a data fiber.
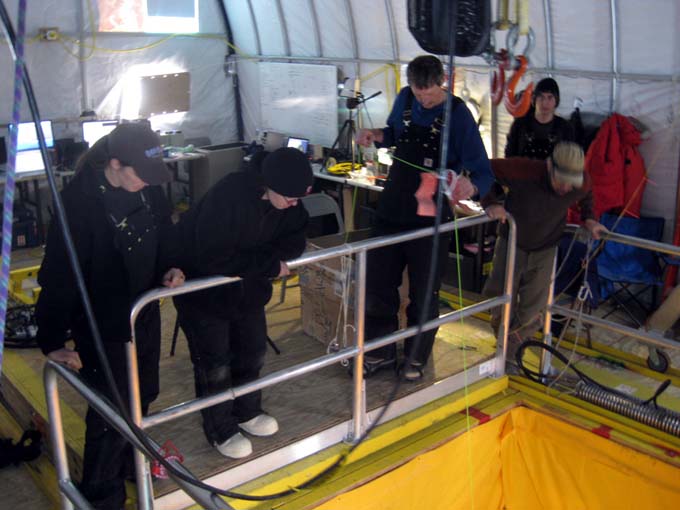
Following a non-recoverable communications link failure to the bot the team slowly retrieves it by tugging on the data fiber.
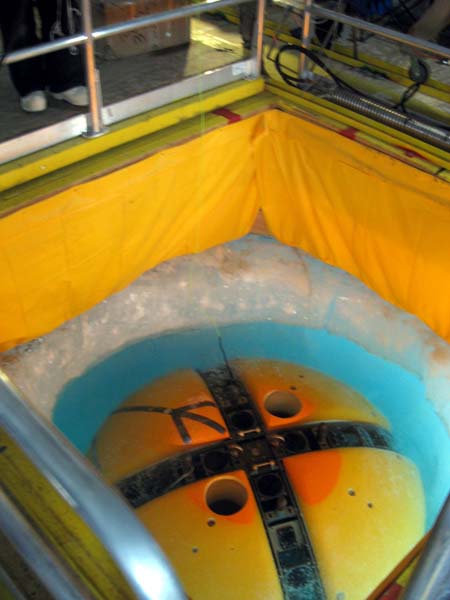
The prodigal bot returns safely.
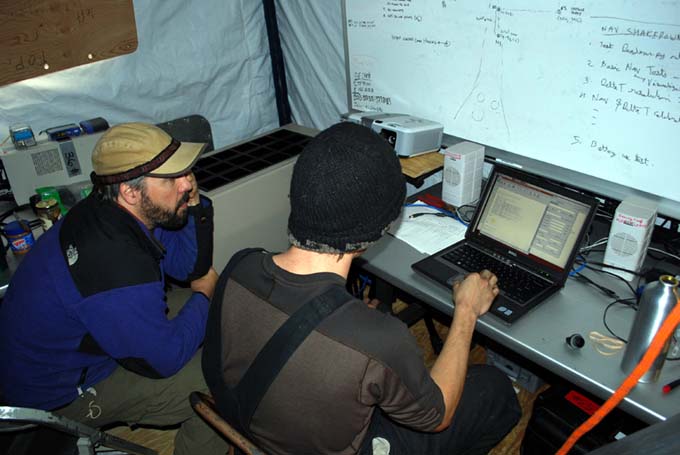
Chris and Bart ponder the power-time history of the mission, looking for clues.

Bart, Maciej, and John Priscu work on the dead Hotsy. Repairing equipment in the field is the nature of work in Antarctica.

And then the storm hit ...
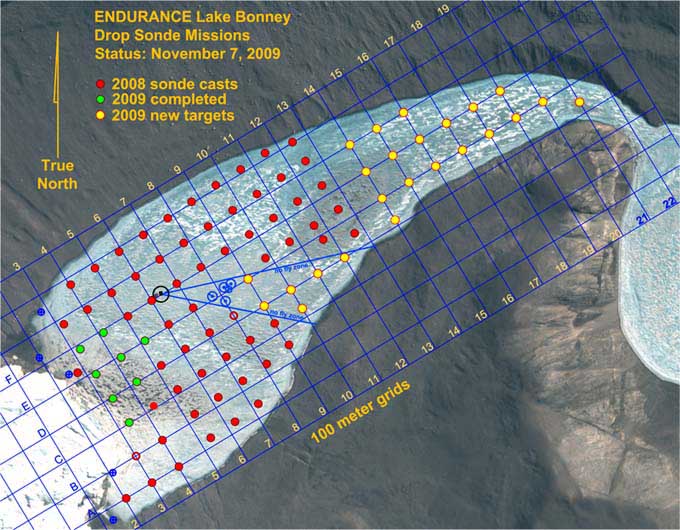
Sonde casts achieved on November 7 (green circles).
Saturday
November 7, 2009
The morning started off auspiciously enough with bright sun and no wind. We had the bot in the water by 11:30am (getting the pre-dive checklist and nav system alignment completed in under an hour) and successively drove to the navigation waypoints established yesterday. This time Bill tracked the vehicle using the magnetic beacon while Vickie took a GPS fix as the vehicle reached each waypoint along the course (we knew where the bot was going this time and were waiting for it to arrive at each point). The GPS points (the second set in two days) would be used to verify that the navigation system was working correctly (it was).
When we reached the conclusion of the navigation re-calibration course Emma Steger (our camp manager) met us with a "banana" sled laden with bamboo flags pre-labeled for the upcoming sonde cast mission planned for today. From there we branched southwest to re-target sonde locations achieved in 2008 (each of which was GPS-located in 2008 and these coordinates were then entered into today's onboard mission so that both year's data could be geo-registered to the same location). We proceeded swiftly along to points E5, E4, D4, C3, and E3. Before reaching F3 mission control reported a fiber snag somewhere in the loop - probably due to under ice cracks or bulges associated with pressure ridges near the glacier. We then began a series of lengthy evasive maneuvers ending with a return to C3, then to D4, then back to F3, successfully. By this time, having started with only 80% charge on the batteries and having maneuvered an additional 500+ meters we were beginning to run low on power and decided to return home, stopping at F4, F5, and F6 on the way. We got the sonde drop at F4 but as the vehicle was slowing down at F5 all communications went dead. All attempts to resurrect it electronically failed so we resorted to reeling it in - slowly - using the data fiber. The vehicle is designed for "ice picking", using rounded posts for contacting the underside of the ice sheet, so it has very low friction resistance to horizontal motion. Provided we encountered no further ice cracks or bulges recovery using the data fiber is straight forward, but slow ... about 5 to 10 meters per minute.
With the vehicle back we began a post-mortem and discovered that the redundant batteries had both tripped around 20% power reserve. An analysis of the time-domain response of the voltages, however, showed the cause: we had been moving at high speed (twice that of last year) and the sudden stopping to acquire a sonde cast caused a current spike to the thrusters which depressed the battery voltage ... enough that one cell in each of the large lithium stacks went below its safety threshold and the auto-disconnect kicked in. By 11pm we had diagnosed the problem and had developed a plan for resolving it. By 12:30am we were packed up and ready to head home ... and into an approaching snow storm.
As if the stars were completely mis-aligned this day, the Hotsy melter system - which we had to run in the melt hole each night in order to keep the hole from re-freezing - died, and another hour was spent in the cold. Post-mission discussions lasted till 3:30am. It was a long day in Antarctica.

East Lake Bonney camp is located about 20 minutes by six-wheeled ATV from the ENDURANCE site. Each day begins with a cold trip in the wind.

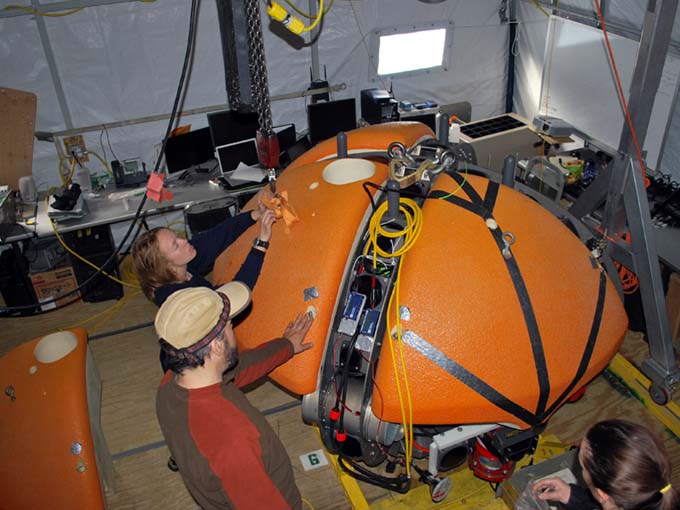
A software bug discovered this morning required a hardware reset in the motor controller pod. Vickie prepares to close up the housing after the fix is in place.

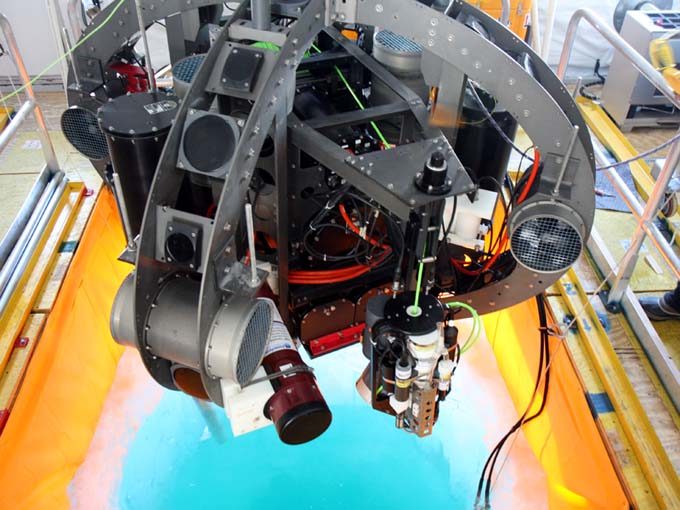
Bill aligns the forward-looking glacier imaging camera (one of three on the vehicle).

Vickie and Bart generate today's vehicle trajectory using the ENDURANCE mission planner.

Shilpa, Vickie, Chris, and Bart check out a replay from the ENDURANCE Situational Awareness 3D visualizer, developed for this year's missions.

The navigation calibration test course for today. The small blue circles to the right are obstacles detected by ENDURANCE. The larger blue circles are "keep out" zones to avoid contacting the vehicle data tether with these hanging obstacles.
Friday
November 6, 2009
November 6, 2009
Prior to commencing production science missions this year we needed to conduct a navigation calibration. There were also further questions about the presence of hanging cables under the ice near the traditional LTR limnological research station located about 200 meters east of the ENDURANCE lab, so plans were made to incrementally approach that zone and perform multibeam sonar scans now that we had calibrated our obstacle avoidance system (see November 5 images).
A rectangular navigation course - see figure - was established along a true north-south grid centered on the lab with the designations N1 through N8. As with the 2008 ENDURANCE mission the method by which we established the calibration was through the use of RTK GPS. Before that could take place, however, it was necessary to locate the bot. The procedure there was to use a low frequency magnetic beacon that was pendulum-mounted inside the vehicle. The null (vertical) axis of the field can be detected at considerable distance (we were able to achieve a positive location out to 150 meters radius this season through 3 to 5 meters of ice cap) using phase-locked loop ring antennas. This is somewhat of an art form to do in real-time but we developed a procedure using two individuals (Vickie and Bill) with two receiver sets. This year the bot moved considerably faster (nearly double) than the previous year, following further power consumption tests that refined the lowest dynamic drag velocity of the vehicle. Thus, the field tracking team had to move fast and keep a location lock, otherwise we would end up burning power while the bot waited at a sonde cast (chemistry) location.
We spent a considerable amount of time scanning the limnology site, finding one full-depth sediment trap and another cable structure, which allowed us to more precisely define the "no fly" zone for our data fiber on normal missions (special missions will sample the "no fly" zone later in the season by using a diversion pole - a smooth tube with a radius larger than the minimum data fiber bend radius).
Following the obstacle location runs we returned to the "N-series" calibration test course. At each designated location the vehicle was put into "ice picking" mode where it was allowed to float up and stabilize under the ice cap. We then localized the vehicle on the surface using the magnetic beacon, drilled a hole, and placed a numbered flag so that we could return to the location. Later in the day GPS measurements were taken at these same locations and the data were reduced to UTM coordinates that could be compared with the vehicle navigation record. With these data, fine-tuning corrections were made to the onboard dead-reckoning navigation (one of four nav systems used by ENDURANCE).
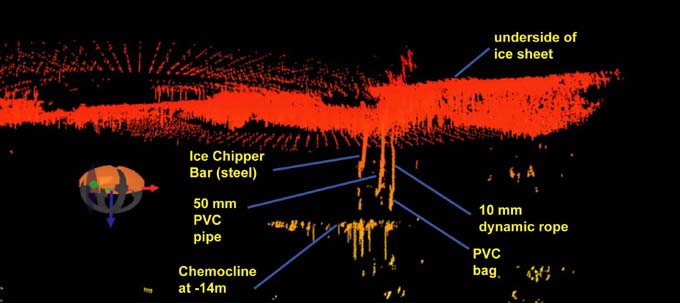
Figure 1
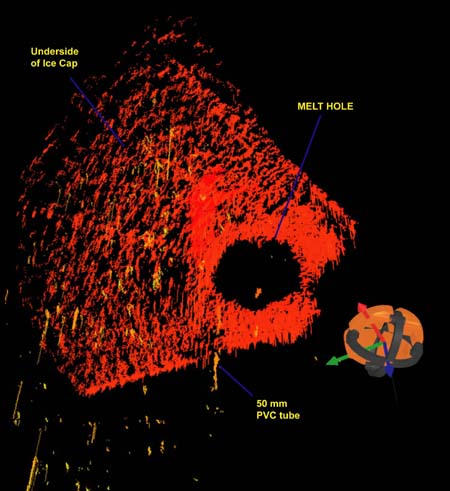
Figure 2
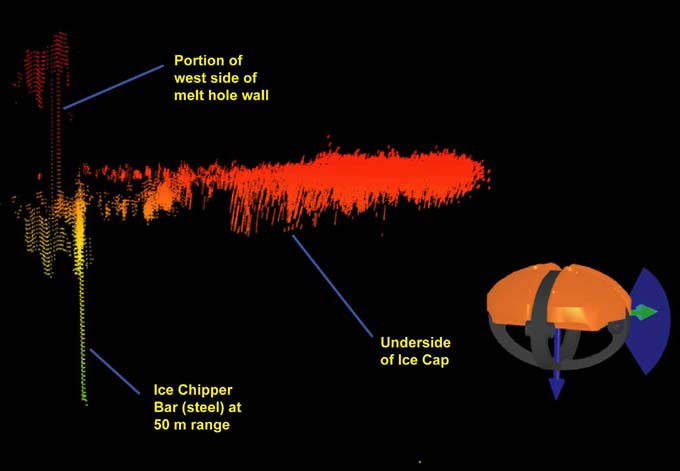
Figure 3
Thursday
November 5, 2009
Today we tested the obstacle avoidance system. This year we have the high resolution Delta T sonar pointing forward for our sonde drop missions to identify objects, such as other science projects, hanging in the lake that may snag our fiber optic link to the bot. This is a change from last year, where had the Delta T facing down to map the lake bottom, so we wanted to see just what kind of objects the Delta T could resolve. Below are some of the results from our tests.
Figure 1. In this augmented reality visualization (part of the newly developed "situational awareness" system for ENDURANCE) the forward looking multi-beam sonar is swept under the ice cap at West Lake Bonney in the vicinity of the melt hole. We lowered three test "obstacles" - a steel ice chipper bar on a 10mm diameter rope; a 50 mm diameter pvc pipe; and a sack of lead weights on a 10mm diameter rope. At 15m radius we were easily able to detect them. The overhead red points are reflections off the underside of the ice cap. Interestingly, we also got returns from the surface of the super-saline chemocline at -14m depth (the yellow vertical lines near the bottom).
Figure 2. In this oblique image of the underside of the ice the bot is about 7 meters east of the melt hole - the underside edge of which can be clearly seen along with a long yellow vertical line on its west edge. This yellow stripe is the sonar return signature from a 50 mm diameter pvc tube that we lowered to a depth of 5 meters below the melt hole - so ENDURANCE is also able to detect plastic materials.
Figure 3. In this final test of the obstacle avoidance and detection system for ENDURANCE we maneuvered the vehicle to 50m radius and 7 meters depth. We removed all obstacles but the steel ice chipper bar (to simulate cables) and the vehicle was able to clearly detect it, along with the western side of the melt hole (the beam pattern from the vehicle was able to "illuminate" the back side of the hole and hence obtain ranges which show up as red vertical lines to the left of the image). The chipper bar shows up as the bright yellow vertical line projecting below the ice cap at the left of the image.

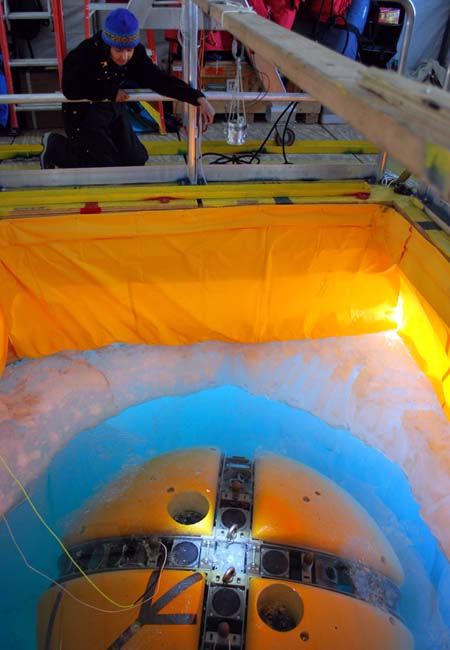
Rachel lowers the bot, complete with syntactic this time, into the melt hole for its first real swim this year.

The products of Bill's underwater chipping efforts float to the surface to be scooped out.

Bill adjusts the visual homing light so that it points straight down the melt hole.
Shilpa inspects the placement of the visual homing light. The bot sees the blinking light with the upward looking camera at the top center and uses this light to navigate its way straight up the narrow hole.
Wednessday
November 4, 2009
This morning we set straight to work on the ballast and got the bot neutrally buoyant pretty quickly. After the pre-dive check we lowered the bot into the water, ready to swim and perform some tests away from the hole. As the bot descended to the lower reaches of the hole for the first time this year it unexpectedly stopped just before it reached open water. We pulled out Maciej's "fish cam" - a small underwater camera, camouflaged to look like a perch, with a live feed to a black and white monitor - and confirmed our fear. The bot was stuck. The hole had started to refreeze and now the last half meter was too narrow.
Fortunately, it was only stuck in one direction, that is, it could not go down but it could still come up. So we brought the bot back to the surface, put the hotsies back in to work on the worst spots and ate lunch while debating our next move. It was decided that Bill would dive in and try to chisel the bottom edge with an ice chipper bar. After some hard work on Bill's part, sure enough, good sized ice chunks started to float up and bob on the surface of the hole. After he made a couple circuits around the bottom edge, he came back up and we pulled him and the new ice chunks out.
Hopeful that Bill's efforts widened the hole enough for the vehicle to pass, we dunked the bot again. Luck was with us and the bot made its way through the hole and down and under the ice. We proceeded to set up the visual homing beacon, a flashing light suspended over the melt hole. With the light in place, we ran some visual homing tests (for more on Endurance's visual homing feature, see last year's blog) and tested other basic behaviors: navigation, station-keeping and ice-picking. Everything is up and running!

This chunk of ice is all that remains of a large lump that was one of our problem spots around the bottom of the melt hole. We were able to saw it off with a trombone melter over night and it floated to the surface.

A close-up view of the ice chunk we sawed off, showing the elongated air bubbles that are present in most of the lake ice.

A technician from McMurdo tests our new 2 kilometer long fiber optic cable. We will use this longer line for our missions to the far east end of the lake.
Tuesday
November 3, 2009
To our delight, a large, irregularly shaped chunk of ice was floating on the surface of the melt hole this morning - the trombone melter had cut off the large flake Vickie had seen underwater yesterday. Removing this 1 meter long by half meter tall by 10 centimeter thick chunk of ice was a little tricky. We ended up screwing an ice screw into each end and lifting it out of the hole with the bot hoist.
Once the rest of the morning ice crust had been broken up and hauled out of the hole, Rachel did some final adjustments with the syntactic mounts, Shilpa, Kristof, and Chris started going through the daily pre-dive procedures, and Bill and Vickie went out to get GPS coordinates of the Bot House for the programmers to use for the vehicle's navigation. At some point in the middle of all this a helo landed and delivered our new, 2000 meter-long fiber optic cable.
Our morning tasks completed, we regrouped after lunch and worked together to put the bot in the water and work on the ballast. Like last year, it was difficult to nail down how much lead we need to put on to achieve neutral buoyancy because of the microbubbles that form on the robot's surfaces (see last year's blog entry on microbubbles). Eventually we got it narrowed down and left the fine tuning for tomorrow.
We suspended the bot above the water and ran the sonde down into the water for testing.
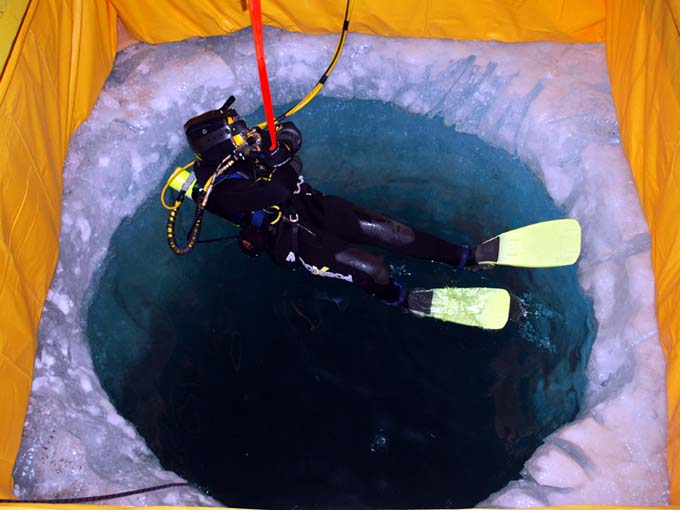
Suited up for the cold water, Vickie is lowered into the melt hole. She is the first woman to dive in Lake Bonney.
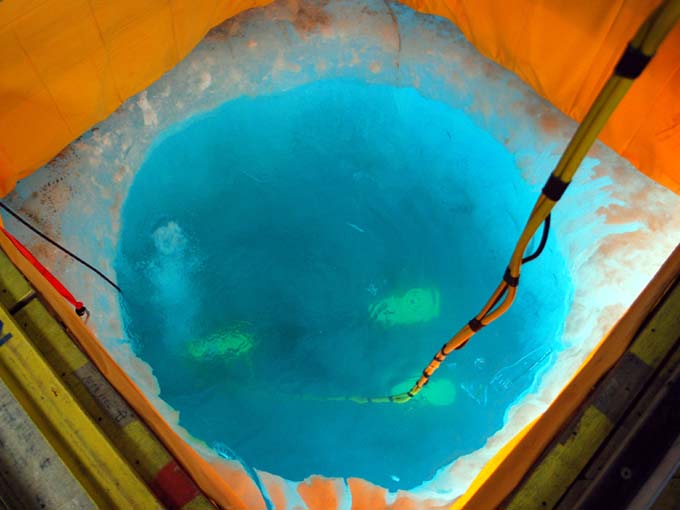
Vickie inspects the lower reaches of the melt hole.
Vickie, Bart and Rachel bolt the syntactic blocks to the bot.
Monday
November 2, 2009
After some hard work by our night shift melters, the hole looked much more promising this morning. We kept the Hotsies running as we got down to work. We ran through the pre-dive checklist and hoisted the vehicle, again without syntactic, above the melt hole. This time, instead of doing a full-vehicle dunk we kept the bot hanging above the hole and ran sonde up and down to check that we had successfully troubleshot the sonde camera communications problem. We had, and the profiler was functioning well, so we turned attention back to working on the hole.
The lake water is typically crystal clear but it is also super-saturated with gases. The vibrating Hotsies knock some of that gas out of solution, making the water in the melt hole very ... fizzy ... like a glass of soda, as tiny bubbles of gas escape the water. While interesting, the effervescence decreases the visibility such that we cannot see the bottom of the ice hole. In order to get a better feel for how the lower reaches of the hole were progressing, we decided to send a human diver into the water. Vickie and Bill assembled the surface-supply diving equipment and suited up in their drysuits. Vickie did the dive and found a few hook-shaped knobs of ice sticking around the bottom and chopped these off with an ice axe, helped the people on the surface measure the diameter of the hole along the bottom, and strategically placed a trombone melt finger so that it would cleanly cut off a particularly large flake of ice.
Satisfied with our new melting strategy, after Vickie's dive we spent the remainder of our time this evening installing the bot's syntactic blocks so that we are ready to go with the next steps first thing in the morning.

Bill unpacks the base station for our Real Time Kinematic (RTK) GPS system.

Vickie and Kristof watch to make sure the bot will not bump the side of the melt hole as it is lowered into the water for the first time this season.

The bot, minus syntactic blocks just barely fits in the melt hole for some initial in-water testing. Two Hotsy fingers (coils) continue to melt the ice during the tests.
Sunday
November 1, 2009
We continue to struggle with the melt hole. Since we are starting our work here nearly a month earlier than we did last year the ice is both colder and thicker (4 meters thick, compared to 3 meters last year), making melting much trickier. Last year the hole took 3 days to melt out. This year's hole was started 13 days ago and while the wind shield we put up yesterday has helped significantly, so far the hole is still too small for the bot to fit all the way through. Bart and Kristof have become amateur Hotsy wranglers, coaxing the fussy machinery to work and readjusting the melt coils throughout the course of the day. Our original ice cowboys, Maciej and Jim, take the night shift. Between the four of them we have the Hotsies running 24 hours a day.
Vickie and Bill left the Bot House for a brief trip to set up a GPS base station at the nearest benchmark, located at the Blood Falls Camp, where we were based last year. The base station will remain anchored to the benchmark for the duration of our work here. The GPS system will allow us to obtain real-time, high-precision coordinates for the sonde-drop points that the bot will travel to once we start running missions.
Later in the day, the hole finally cleared out enough that we could just barely submerge the bot, without the orange syntactic blocks, to run some basic tests and check that none of the electronics housings were leaking. No leaks turned up and all systems functioned normally, with the exception of some minor problems with a data line to the sonde camera.
As of this evening, the bottom of the hole is still too narrow, so it will be another long night out on the lake for the Hotsy cowboys. Thanks guys!
Blog entries from previous weeks
can be found below:
October 6 - 31, 2009
Personnel:
Dr. Peter Doran is the
Principal Investigator for the Endurance
project. He has been studying the lakes in the Antarctic Dry Valleys
for 15 years and is a professor at the University of Illinois, Chicago.
Dr. Bill Stone is a
Co-Investigator for Endurance. He is also the
president and CEO of Stone Aerospace, the engineering company that
designed and built the Endurance vehicle.
Dr. John Priscu is a
Co-Investigator from the University of Montana. He
has been studying the lakes in the Antarctic Dry Valleys for over 20
years.
Bart Hogan is a mechanical
engineer for Stone Aerospace.
Dr. Kristof Richmond is a
programmer for Stone Aerospace, focusing on
navigation.
Shilpa Gulati is a programmer
for Stone Aerospace, focusing on the
system executive and machine vision. She is also a PhD student at
University of Texas, Austin.
Chris Flesher is the vehicle
manager, programmer, and electronics
technician for Stone Aerospace. He is a Masters student at UT Austin.
Rachel Middleton Price is an
electronics
technician for Stone Aerospace.
Vickie Siegel is chief vehicle
technician and logistics manager for Stone Aerospace.
Maciek Obryk is a graduate
student at the University of Illinois at Chicago.
Emma Steger is the Lake
Bonney camp manager.