
StarCAM - A 16K stereo panoramic video camera with a novel parallel interleaved arrangement of sensors
January 13th, 2019
Authors
Meyer, D., Sandin, D., Mc Farland, C., Lo, E., Dawe, G., Wang, H., Dai, J., Brown, M., Nguyen, T., Baker, H., Kuester, F., DeFanti, T.About
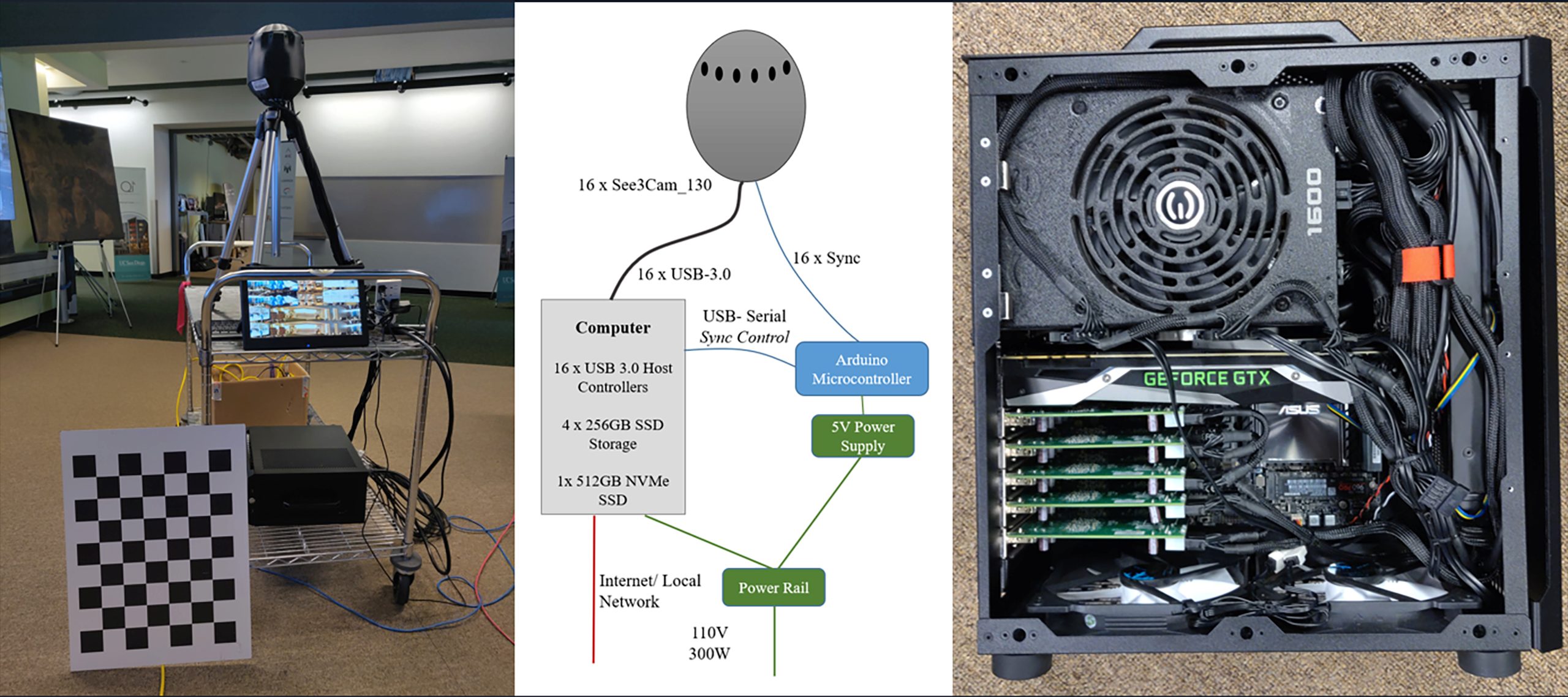
The most common sensor arrangement of 360 panoramic video cameras is a radial design where a number of sensors are outward looking as in spokes on a wheel. The cameras are typically spaced at approximately human interocular distance with high overlap. We present a novel method of leveraging small form-factor camera units arranged in stereo pairs and interleaved to achieve a fully panoramic view with fully parallel sensor pairs. This arrangement requires less keystone correction to get depth information and the discontinuity between images that have to be stitched together is smaller than in the radial design. The primary benefit for this arrangement is the small form factor of the system with the large number of sensors enabling a high resolving power. We highlight mechanical considerations, system performance and software capabilities of these manufactured and tested imaging units. One is based on the Raspberry Pi cameras and a second based on a 16 camera system leveraging 8 pairs of 13-megapixel AR1335 cell phone sensors. In addition, several different variations on the conceptual design were simulated with synthetic projections to compare stitching difficulty of the rendered scenes.
Resources
URL
Citation
Meyer, D., Sandin, D., Mc Farland, C., Lo, E., Dawe, G., Wang, H., Dai, J., Brown, M., Nguyen, T., Baker, H., Kuester, F., DeFanti, T., StarCAM - A 16K stereo panoramic video camera with a novel parallel interleaved arrangement of sensors, IS&T International Symposium on Electronic Imaging 2019 Stereoscopic Displays and Applications XXX, no 646, Burlingame, CA, pp. 1-7, January 13th, 2019. https://doi.org/10.2352/ISSN.2470-1173.2019.3.SDA-646