



Lake Bonney Expedition 2009
The second deployment has been successfully completed.
Full details are available at the
Stone Aerospace ENDURANCE 2009 Blog.
You can learn more about current events from Kristof Richmond at
Kristof's blog
and from Emma Steger at Emma's
blog and from Shilpa Gulati at
Shilpa's blog.

Jim and Maciek continue work on GMH09, the glacier melt hole. We are still at least a day away from being able to surface at this location.

Vickie debugs the flooded slip ring.

Re-assembly of the errant slip ring.
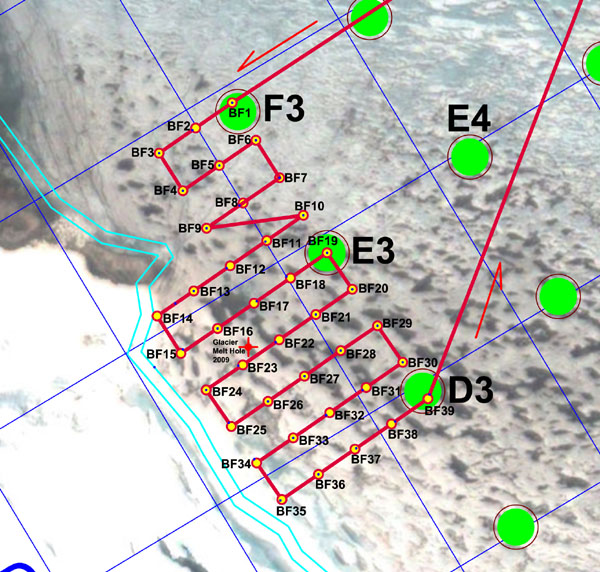
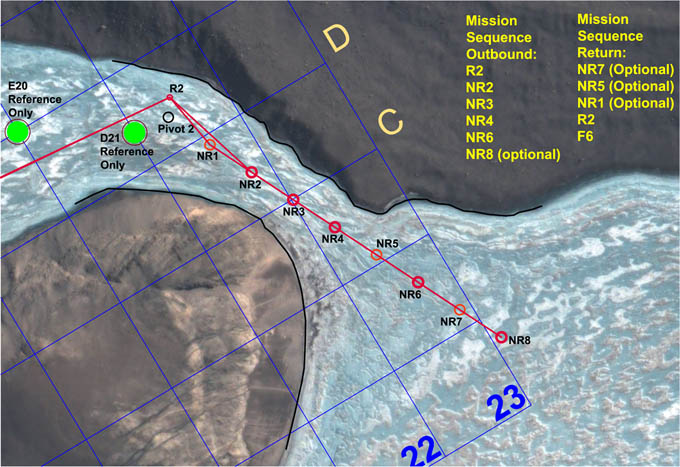
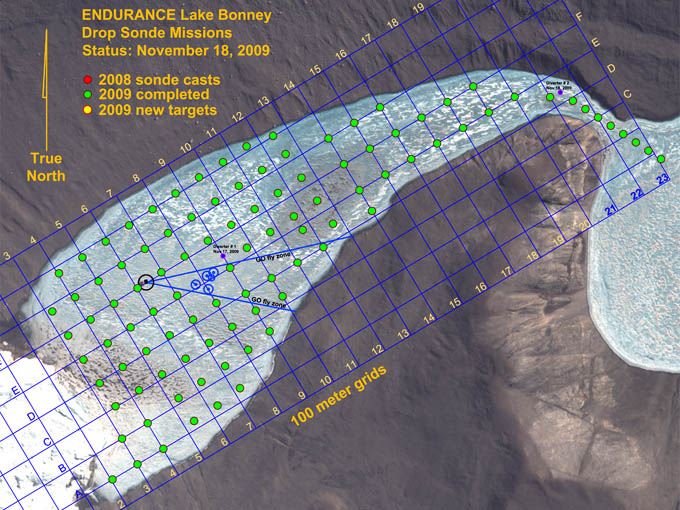
Mission plan for November 21 called for an ambitious 39 sonde casts. Yellow-filled red circles are the target points. Real-time GPS locations of the actual sonde casts are shown as dark blue dots.
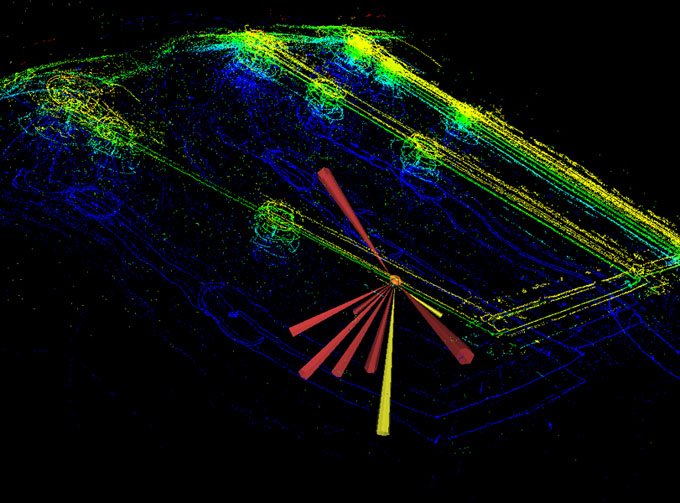
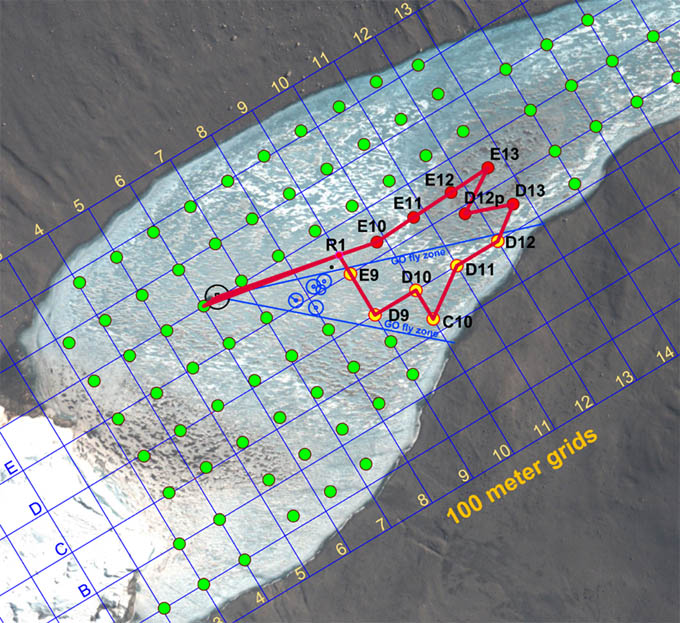
A portion of the mission trajectory. Yellow and bright green lines show the trace of the vehicle sonars on the underside of the ice cap; deep blue lines are bottom sonar returns from the lake floor. Circular clusters of activity show locations of sonde casts. The vehicle thrusters were shut down during these times and, if the ice surface was not flat, the vehicle could either slide, rotate, or both over short distances. Surface GPS recorded the final stabilized location of the sonde cast.
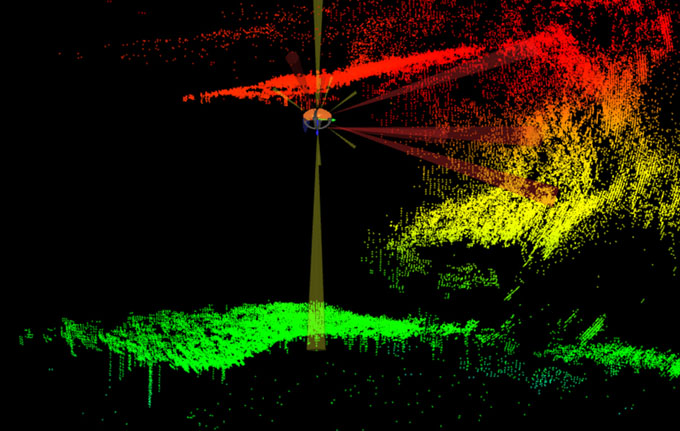
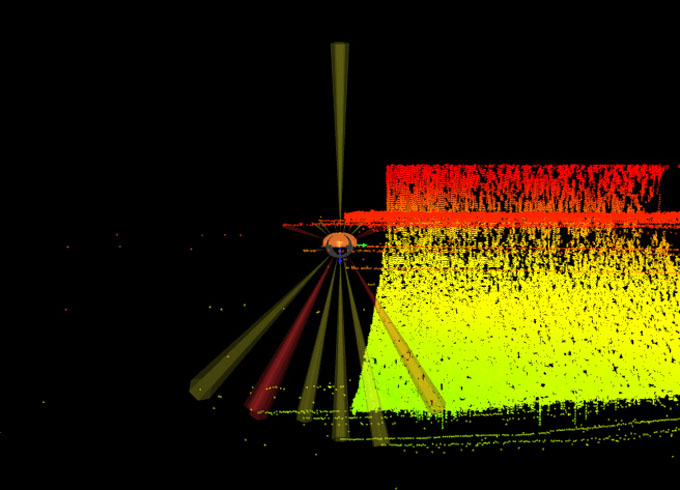
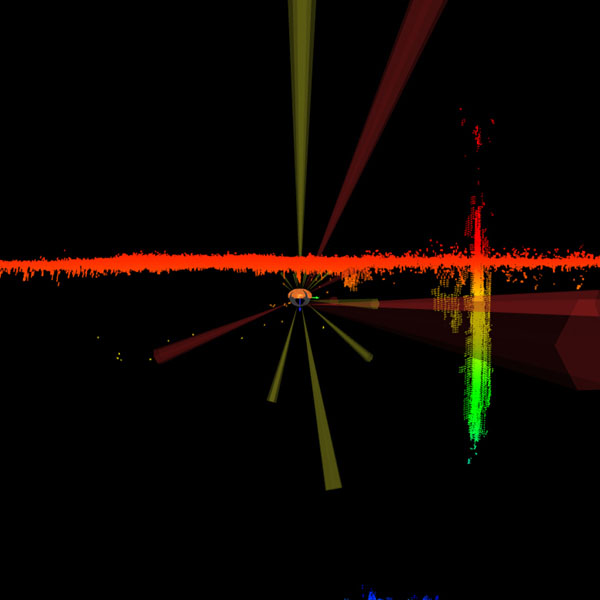
Although this mission was not targeted specifically at Taylor glacier, we were within multi-beam sonar range and caught several interesting glimpses of the underwater portion of the glacier. The bright red points show the underside of the ice cap and the beginning of the top of the glacier. The ice cap thinned as it approached the glacier. The shadows between the green and yellow points highlight the unknown region beneath the glacier we hope to investigate in the next few days.
Saturday
November 21, 2009
Everyone was up at 7am. The rumor today was that helo-ops was going to make an attempt to reach Peak 1882 today to repair the internet repeater link that has been down now for 11 days and counting - it's only after you lose your high-tech link to humanity that you begin to realize how remote the Dry Valleys are.
By 10:13am the bot was in the water and being "burped". This was usually accomplished with a boat pole, causing the vehicle to rock significantly in pitch and roll to encourage trapped air to come loose. Chris had implemented a text translator for the vehicle status monitor so that critical warning messages would be vocalized over the speaker system in the lab. Thus, hearing the computer-generated phrase "High Roll and Pitch" boom out over the speakers meant that you were rocking the vehicle sufficiently to purge the residual air bubbles. By 10:22am Sonde Mission 16 was underway to Taylor glacier. Shortly before noon the mission was aborted. The data feed from the sonde instrument payload was being intermittently interrupted. In normal operations the Sonde was an independent autonomous entity and it would relay data packets to the main System Executive that oversaw management of the mission. Today, the System Executive reported all systems operational but for some reason the data link to the Sonde would periodically drop out. Since the fine grid sonde mission was the objective, we could not continue with only partial data being recovered. Thus we issued an override causing the vehicle to return to the lab.
During the half hour return flight from the glacier we pondered what had happened. There was no question that whatever problem had arisen was not in the main vehicle but lay somewhere between the main power/data interface and the sonde. The key clue lay in the fact that the data drop outs appeared to be periodic. The only thing that was periodic about the Profiler system was the rotation of the drum that was spooling out the instrument package. Because the drum rotated and the data and power had to come in through a fixed cable connection we employed a device known as a "slip ring" to avoid twisting the cable. This is a rather complicated device that transfers all of the electronic connections through a series of rotating contacts, all contained within a waterproof housing. We focused our efforts there. At 2pm, with Vickie leading the investigation, we pulled the slip ring from the vehicle and found it to be flooded with highly salty water. Since we had maneuvered only in fresh water during today?s mission this could only have come from the previous day?s sub-chemocline buoyancy calibrations. As we carefully dissected the instrument we discovered something odd: a radial o-ring at one end of the sealing cover was not in its proper groove, but rather was compressed into a radial gap between two of the rotating cylinder core elements. The unit had been refurbished in mid-2008 and apparently the technician charged with the reassembly had mistaken the rotating clearance gap for the o-ring groove and installed the o-ring there. From a casual glance it would have looked correct. But when the system had gone to 27 meters depth the previous day the external hydrostatic pressure was enough to buckle a short section of the o-ring inward into the gap, thus creating a pathway for water to enter. Enough water seeped in to leave a quarter liter of the brine sloshing in the bottom of the slip ring. As the drum rotated, the contacts would periodically immerse themselves and short out, dropping the communications data for a short period of time. Fortunately, the contacts themselves had been robustly designed and had not corroded. Vickie completed the debug and rebuild by 4pm. During this time the vehicle had been placed on charge and by 5:30pm we were back in the water and headed for Taylor glacier.
The mission proceeded almost flawlessly from that point forward, with the surface tracking team spending the next 8-1/2 hours on the ice keeping up with the bot as it maneuvered to the 39 pre-designated sample points. The live GPS fixes for the actual sample locations are shown as small dark blue dots within the red and yellow target circles. The majority of the navigational drift, where present, was due to the vehicle sliding on the ice ceiling during ice picking (when the thrusters were shut down for power conservation during a cast) - the ice cap frequently was not flat and given the very low friction of the ice picking contact hemispheres it would slide more than a meter on occasion. We were not able to reach point BF14 (see figure) due to the presence of underwater obstacles. We retargeted to a point halfway between BF13 and BF14, then moved on to BF16, then BF15, and BF15a (shown as an un-labeled blue dot under the glacier) before resuming the remaining as-planned sonde casts. During the cast at BF15 the floor sediment in the last few meters absorbed the altimeter sonar pulse and the auto stop system did not trigger. The instrument payload contacted the bottom momentarily before mission control caught it and ordered a retrieval. The sonde instrument readings appeared to be unaffected and the mission was continued to completion. The bot returned to the lab at 2am and the final crew returned to basecamp at 3am.
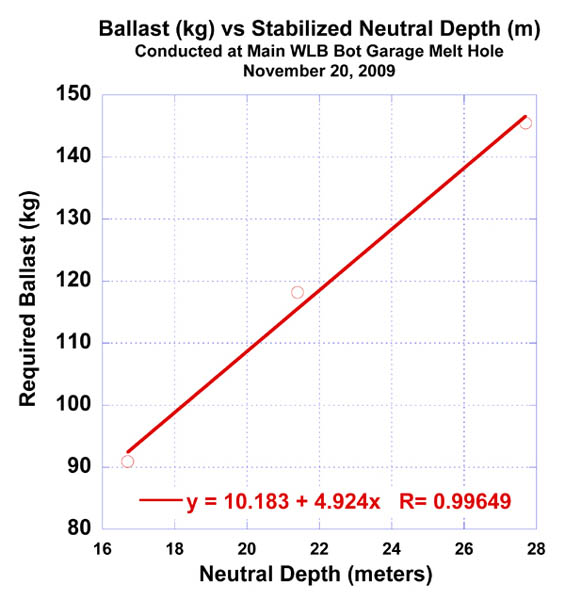
The recorded sub-chemocline ballast data at the main lab melt hole showed a near linear fit. The team planned for initial ballasting to 21 meters depth to explore underneath Taylor glacier.
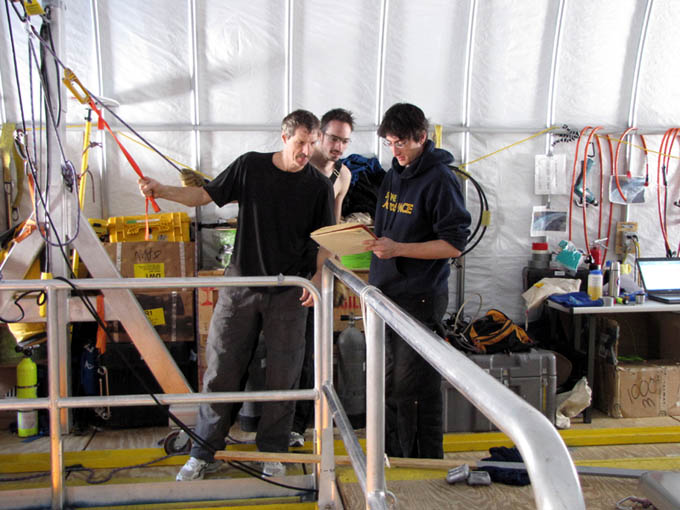
Kristof and Bill man the 2:1 haul system to retrieve the bot following a neutral ballast test. The vehicle was sequentially weighted and the neutral stabilization depth in the sub-chemocline zone was recorded. These were compared with numbers Chris (at right) had predicted based on free-release accelerations (which we could record very accurately with the onboard IMU).
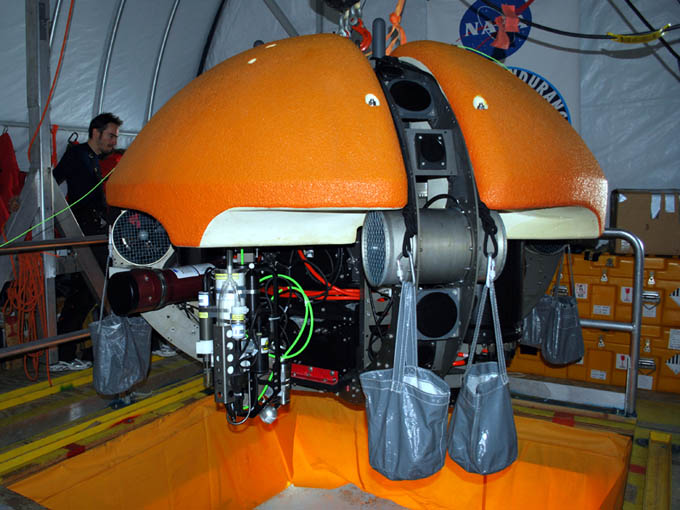
The ballasted bot: with 145 kilograms of lead distributed evenly in eight satchels around the perimeter.
Friday
November 20, 2009
This was planned as an extremely long day. The team was up and working early and by 10:30am a pulley system was installed over the melt hole and the first test load of lead had been loaded into the carrier bags located about the circumference of the vehicle. Three tests were conducted with the following resulting data acquired:
| Ballast (kg) | Neutral Depth (m) |
| 145 | 27.7 |
| 118 | 21.4 |
| 91 | 16.7 |
No thrusters were used in these experiments and, because the overhead electric hoist only had 6 meters of range, we used a manual, 2:1 rope pulley system and ascenders to maneuver the vehicle passively down into the chemocline.
Meanwhile, Vickie had re-acquired the GPS location for the glacier melt hole (now labeled GMH09), since the position had moved since our original fix several weeks earlier due to abnormally warm weather over a two day period sending runoff water ponding at the original site. By this time GM09 was 1.9 m in diameter - still too small to allow for the bot to surface there - and Maciej and Peter had two Hotsy coils running 24/7.
Although the original mission for today, following the ballast tests, was to scan the central portion of the glacier where the sub-chemocline mission would be run and thence make a trial approach and docking at GMH09, interest began to change amongst the science team to conduct a refined grid sonde mission near the glacier effluent source. A total of 39 sonde casts were being discussed with a predicted 9 hour run time. It was decided to forego the glacier scanning and docking experiment to get these sonde data. It was going to be a marathon mission, after which the team would sleep in late, take Sunday off and then return to the sub-chemocline mission on Monday.
By 2:44pm the vehicle charging had been completed and the mission plan was generated and loaded for the "Fine Grid" mission. However, at 4:30pm, not long after the bot had been released for descent through the melt hole, bubbles were seen coming out of the vehicle. The vehicle was immediately recovered and inspected and found to be in working order - the bubbles apparently having been from a captured pocket of air that did not get released during the normal "burping" exercise that we perform before releasing the vehicle. This false alarm pushed our schedule too far and it was decided to abort the mission and start early tomorrow.
At 5pm Vickie and Bill resumed the RTK GPS survey roundup of prior sonde cast location, completing all but six. Everyone was in bed by 10pm.

View of the vehicle with the sub-chemocline ballast carrier test rigging.
Thursday
November 19, 2009
With the sonde casts completed for 2009 we turned our efforts today to the more complicated task of exploring beneath Taylor glacier. We completed a 3D map of the entire face of the glacier (and its north and south lateral moraine areas) in 2008 but in the central portion of the glacier it appeared that the glacier was floating on top of the super saline chemocline at 14 meters depth. Below that, we had no 3D imaging returns (due to acoustic bounce off the denser water). So our next objective was to go through the chemocline, neutrally ballast the vehicle at a depth that would split the difference between the beginning of the chemocline and the lake bottom (at approximately 28 meters in that location) to give us the best chance to enter any sub-glacial caverns, if they existed. The problem with this scenario is that there is a dramatic increase in buoyancy at the chemocline. Earlier measurements from the LTER project predicted a water density of 1090 kg/m^3 at 20 meters depth and 1110 kg/m^3 at 40 meters depth, thus a precise ballasting would be required to achieve neutral buoyancy at the desired depth. With a vehicle displacement of approximately 1.5 cubic meters estimates for ballasting the vehicle at 21 m depth ran as high as 160 kg of additional lead that would have to be added to the vehicle - otherwise it would bob like a cork on top of the chemocline.
We were operating under further, administrative, restrictions imposed by the environmental impact statement (a 3 cm thick document) that the project had to file in compliance with the Antarctic Treaty (the Dry Valleys are in a specially protected locality). This allowed for no powered flight below the chemocline except for limited forays permitted immediately adjacent the glacier. This presented a logistical problem: we had to fly almost half a kilometer from the lab to reach the glacier, yet the vehicle did not have sufficient vertical thrust to maintain itself within the fresh water lens if ballasted to operate neutrally below the chemocline. The approach that evolved over 2009 was as follows:
- create a second melt hole at the glacier
- have the bot surface there
- attach the ballast lead
- conduct the sub-chemocline sub-glacier mission
- return to the melt hole and remove the ballast
- return to the lab for recovery
The second and third steps required a second portable gantry at the auxiliary melt hole and a means to quickly attach and remove the lead. Bill and Vickie spent today transporting lead to the bot garage from the helo drop zone and working up a rigging system for quick attachment of the lead. The solution was low-tech: eight heavy duty contractor open-top haul bags were connected to four sets of double 11 mm PMI rope harnesses that could be looped over the four auxiliary lift eyebolts between the four syntactic flotation blocks (see figure). The ballast calibration test would take place tomorrow.
Meanwhile, Kristof, Shilpa, and Chris performed several hours of short range calibration runs with the vehicle out to 200 meter radius from the melt hole to test the sensitivity of the iUSBL navigation system. These suggested that the melt hole transponder battery was dying. We subsequently disassembled the transponder and replaced the power pack.
The team returned to basecamp at 8pm. At that time John Priscu announced that the sonde data were indicating a potentially exciting discovery of an anomalous, very cold water entry near Blood Falls at cast G3. He and Peter Doran had discussed the findings and requested that we develop a mission plan for a refined sonde cast matrix in that area to localize the source. Everyone was in bed at 12:20am.
The bot was programmed to proceed directly to mid-stage targeting point R2, 1520 meters from the lab while mapping the south lake shore grounding line along most of that distance. It then proceeded southeast through the narrows and more than 400 meters out into East Lake Bonney. It performed 8 sonde drops along the way (the "Ninja Romeo" series).

The November 18 narrows mission would be the longest ever attempted with ENDURANCE. To ensure the bot would make it back we kept the vehicle on charge through the sonde calibration cycle. The vehicle was then lowered into the water, the sonde "homed", and the cables freed to allow it to begin its journey.

The bot garage was abuzz with helo activity today, with several pickups and drop offs. Here an ASTAR is dropping off another load of AN8 (diesel) for the main 10 kW generator.
Kristof Richmond (standing in the bot garage) mimes the mission programming steps for the run through the narrows.
In addition to the sonde runs through the narrows, today was also the first lateral imaging bathymetry mission. We maintained an 80 meter standoff range from the south shoreline (which we had acquired with RTK GPS) and mounted the multi-beam sonar in its horizontal (forward-looking) position. Because the vehicle is orientation-independent, we rotated the multi-beam so that its field-of-view was perpendicular to shore and drove the vehicle "sideways" down the lake to achieve the desired scan. Yellow points in this figure are valid bottom bathymetry hits; the bottom of the red points represents the underside of the ice cap. Above that are multi-path ground bounce (fictitious) points which will later be filtered out in the post-processed data set.

Bill sets station NR2 in the heart of the Bonney Riegel narrows.
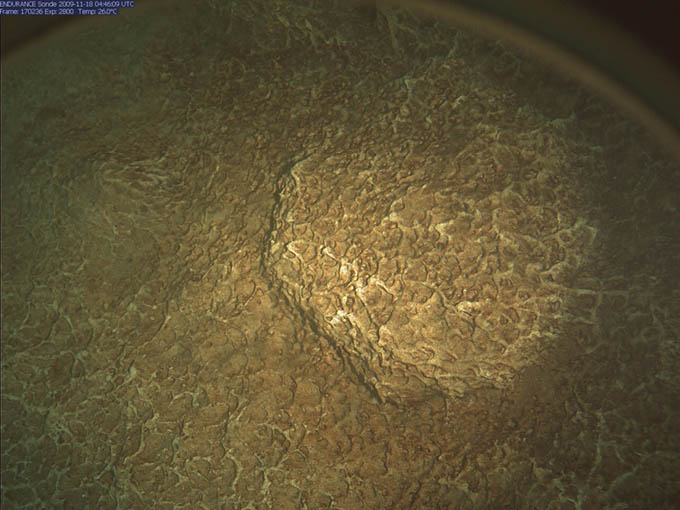
The sonde camera bottom image at station NR2, showing what appear to be dendritic microbial mats.

Looking out into East Lake Bonney from sonde point NR8.

The narrows looking northwest from NR8. Vickie sets the final drill hole for GPS tagging.
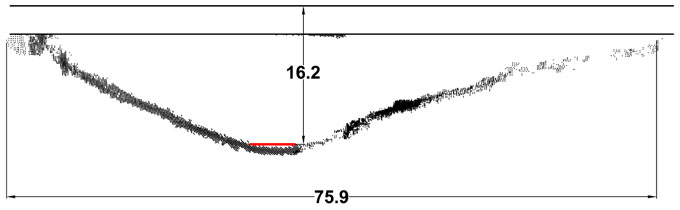
Lake Bonney water levels: 1903 vs 2009. This computer-generated plot shows a slice through the 3D sonar data acquired by ENDURANCE as it navigated through the narrows. Scott's party, whose ice width measurement is plotted to scale here in red, almost certainly stood at this location, about halfway between NR2 and NR3. The top horizontal line represents the surface ice cap level today; the second horizontal line represents the measured underside of the ice cap today.
With the December 18th mission the entirety of West Lake Bonney sonde grid was completed, plus the additional 8 casts made through the narrows.
Wednesday
November 18, 2009
With the success of the previous day's foray into the "no fly" zone behind the LTER limno cables and the knowledge that with proper battery balancing we could likely hit 5 kilometers of cruise range with the new power stacks, we began hatching a plan to visit East Lake Bonney. The previous year we expected that it would be necessary to create an auxiliary melt hole a kilometer east of the bot garage where we could surface and recharge the vehicle and then maybe continue on to the end of West Lake Bonney. The new batteries made that obsolete, but it did not solve the problem that the "narrows" at Bonney Riegel made a sharp 90-degree turn. With the presence of boulders along the lake edge, the probability was high that the data fiber would be drawn into the boulders and snag the vehicle if we attempted to navigate through the narrows. The success of the diverter pole concept changed all that.
We began work on the complicated mission plan at 11am. This work was punctuated by the arrival, on short notice, of a Bell 212 load of NSF visitors who toured the lab for close to an hour then choppered off. By 2:20pm we had the plan and vehicle trajectory worked out: the anticipated mission length was 3,931 meters with 8 sonde drops through the center of the Narrows. Run time was predicted at 6.5 hours door-to-door with 5.5 hours underwater. Some time before that, Vickie had driven an ATV out to the Narrows with the RTK GPS equipment and had set out two new locations "R2" and "Pivot2" - the latter was the location for the diversion tube and the former was the targeting point for the bot some 30 meters to the northeast of the tube to ensure the fiber stayed on the north side of the tube as the bot headed southeast. At 3pm John Priscu drove out to run the Jiffy drill and install the pipe. By this time we had also upgraded the radio communications system at the lab with a 5-watt base station that could be received all the way to East Lake Bonney camp ? the previous hand-held radios inside the lab had difficulty with interference from the metal arch frames of the habitat.
By 3:50pm the bot was underway to station R2 with a predicted 100 minute run time to get there. Meanwhile, Kristof began a novel dance physically miming the vehicle programming for today with Shilpa calling out the various commands to verify that the bot was going to do the correct thing inside the narrows. We had the multi-beam sonar configured in side-look mode and it had been programmed to scan the south shore of the lake from an 80 meter standoff on its way outbound (see figure for a glimpse of the data results from the 3D visualizer). However, once it got to the narrows we needed to perform a series of obstacle avoidance sweeps to ensure the way forward was passable. The least energy configuration for achieving this (and today every coulomb counted) was to perform a 180 degree yaw rotation of the vehicle at the sonde drop points and then continue forward, alternately sweeping each side of the narrows; on the return to base the bot would sweep the opposite quadrants and all of this was verified by Kristof?s miming routine. For the same reasons, prior to launching the bot today we kept the vehicle on charge while the sonde calibration was being performed and only removed the charge cables at the exact instant when the vehicle was ready to be released.
At approximately 5:45pm Bill and Vickie detected the vehicle under station R2 and verified it was sweeping past the pivot point on the correct side for a safe passage. They continued tracking it for another 400 meters out into the wide open expanse of East Lake Bonney. By 8pm the vehicle was back at R2 and the diverter tube was removed, leaving roughly 1600 meters remaining to reach the lab. The vehicle arrived at the bot house on cue shortly before 10pm and post-processing of the data took place for another 2 hours. We headed for bed at 12:30am. Given the long last three days we gave people till noon to recover. With the additional maneuvering to station F6 and some short range navigation testing prior to surfacing the total actual mission length was 4250 meters.
Today's mission was of some historical interest. In 1903 Capt. Robert Falcon Scott's party passed through the narrows at Bonney Riegel. In addition to taking several black and white photographs they also measured the width of the narrowest portion of the ice at that location. This was a crucial measurement that, together with the high resolution multi-beam measurements just acquired by ENDURANCE, enabled us to demonstrate that the water level in Lake Bonney had risen more than 16 meters since Scott?s team was there. We wondered what they would have thought had they known that 106 years later a robot would be hovering beneath where they had stood.
The November 17 mission plan took the bot into last year's "no fly" zone to achieve full lake sonde cast coverage. To do so we employed a fiber diverter (the small black circle adjacent to R1).

From waypoint R1 we navigated back to the diversion point (30 meters away) to verify the status of the tube. Since all gear coming to our site is flown by helicopter, the MEC shop sent the tube out in sections. The tube is actually suspended from its bottom by a length of parachute cord inside the tube and gravity holds the pieces together. We duct-taped the joints, however, to prevent a fiber snag.
The multi-beam scan clearly showed the presence of the limno sediment trap cables extending the full depth of the lake, just behind the diversion tube.

Vickie listens for the approach of the bot to station R1 during the November 16 sonde mission. On a long approach to the first point in a grid, the tracking team can estimate the location where the bot will be and drive there (using an ATV). By orienting the radiolocation coil horizontally and using a digital phase-locked loop receiver, it is possible to detect the approach or recession of the field. Two people using these in orthogonal directions can predict the arrival from almost 200 meters out.

The tracking team at station D9, the point of maximum angular incursion into the previous "no fly" zone.
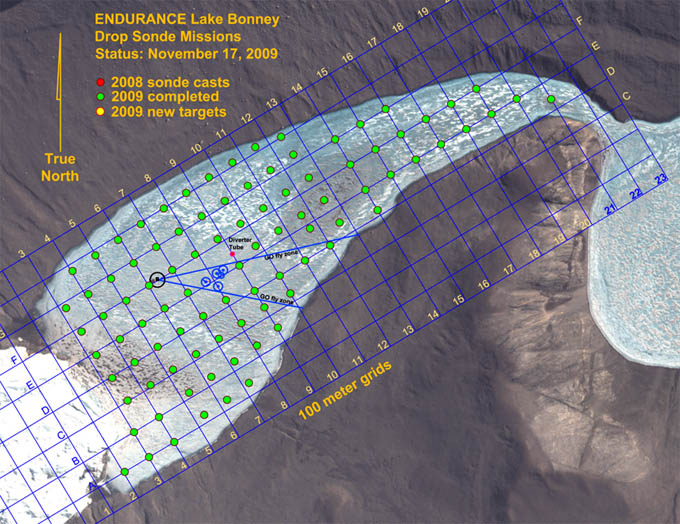
As of the conclusion of the November 17th mission the entirety of West Lake Bonney was sampled, bringing to fruition the concept developed five years earlier by Peter Doran and Bill Stone - that a robot could do with repeatable precision what no dedicated field limnological team could achieve: the full 3D aqueous chemistry characterization of an entire sub-glacial lake in a single season.
Tuesday
November 17, 2009
Although ENDURANCE is an autonomous underwater vehicle (AUV) - it has several independent onboard navigation systems and auto-return and docking behaviors and can be programmed for entirely 'hands-off' missions; in addition it contains its own redundant power supplies and is self-sufficient for up to 10 hours on its own -- we have found over time the enormous benefit of a fiber optic data link to mission control. On deep space missions NASA enjoys the benefits of seeing (in delayed real-time, due to the transit speed of light) the responses and actions of its deep space probes and can upload revised mission plans if problems are foreseen, or, more importantly, if new science is detected in the data stream so that the vehicle can take a closer look. For identical reasons, the science coming from Lake Bonney ranks #1 on the priority list of what we are here to achieve and we have found it prudent (given the investment in the vehicle) to look over the shoulder of the bot during most missions.
Underwater, however, bandwidth is limited and the only way to see real-time data - especially the torrents of geometry data coming from a vehicle like ENDURANCE ? is through fiber optics. Thus we trail out a thin data filament on all missions. The new ENDURANCE ?situational awareness? 3D visualizer was built around this capability and it has allowed us on many occasions already to catch new features and to immediately investigate them during the course of an ongoing mission.
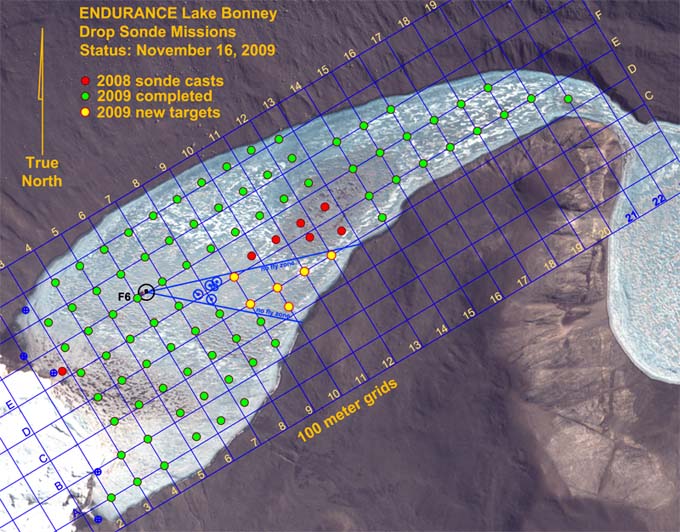
This capability comes with a price in a sub-glacial environment, namely the possibility of fiber snagging. Lake Bonney has an unusual constituency: under the 3 to 4 meter thick ice cap is a 10 meter fresh water lens riding on top of a 27 meter thick, ancient, hypersaline layer. The buoyancy of that layer is sufficient to cause a vehicle like ENDURANCE (ballasted to free-fly in the fresh water lens) to bob like a cork on water. Within this restricted domain we had three choices in the design of the data fiber: to have it sink and float on the salt layer; to have it neutral and free-float in the fresh water lens; or to make it positively buoyant and float under the ice cap. The middle option was ruled out due to the possibility of it wrapping up on the vehicle. But we did come equipped to work either of the other scenarios. Fortuitously, it turns out that the underside of the ice cap at Bonney is glass smooth in almost all localities except for some notable pressure-ridges near the glacier, and so we have successfully operated using the floating fiber approach. There are, however, several permanent science monitoring experiments near the center of the lake that are used by the LTER program and these have cables that run the entire depth of the lake. They constituted enough of a fiber snag concern that during 2008 we designated the "shadow" area (see map) behind the limnological experiments to be a "no fly" zone. This year we came prepared to scan the entire lake.
The concept was simple enough: sink a 100 mm diameter smooth wall PVC tube through the ice cap so that it projected out approximately 3 meters below the underside of the ice and strategically divert the fiber away from the known obstacles. After selecting this point in the mission planner Vickie tracked out and marked it using GPS. Peter Doran then took responsibility for placing the tube (the location can be seen in the two figures as a small black dot just northeast of the obstacles, shown as blue circles). The procedure involved using a "jiffy" drill to make the hole and then lowering the tube on a piece of parachute cord to the precise depth. By 11am we received the cryptic radio message "Diverter King to Bot Garage. Mission complete," meaning the tube was in place.
Today was a sunny, windless day, so we took the opportunity while the pre-launch checklist was being run to collect GPS fixes for some previous sonde casts (E14, E15, E16, E17, E18, E19, E20, F10, F11, F12, F13, F14, F15, F16, F17, F18, F19, G11, G12, G13, G14, G15, G16, H11, H12, H13, D14, D21). The bot launched at 2:45pm with the initial waypoint being R1, just 30 meters north of the diverter tube. We took the opportunity to navigate over to the tube for a visual inspection (see figure) as well as to verify the sonar image of the limno cables (our adversary today) then continued on with the pre-programmed mission to the final sonde casts for the general lake set in 2009: E10, E11, E12, E13, D12p, D13, D12, D11, C10, D10, D9, E9, F6.
The mission proceeded flawlessly. Run length was 1803 meters over 5 hours and 20 minutes, with 42% power remaining when the bot rose up the melt hole - all predicted within a few percent by the mission planner, which Bart Hogan had meticulously calibrated to recorded performance data prior to his departure. Also, the new balancing procedure developed for the batteries indicated that all but 3% of the theoretical maximum power was accessible. And the diverter tube concept had worked. This gave us ideas for a mission none of us believed possible before today.
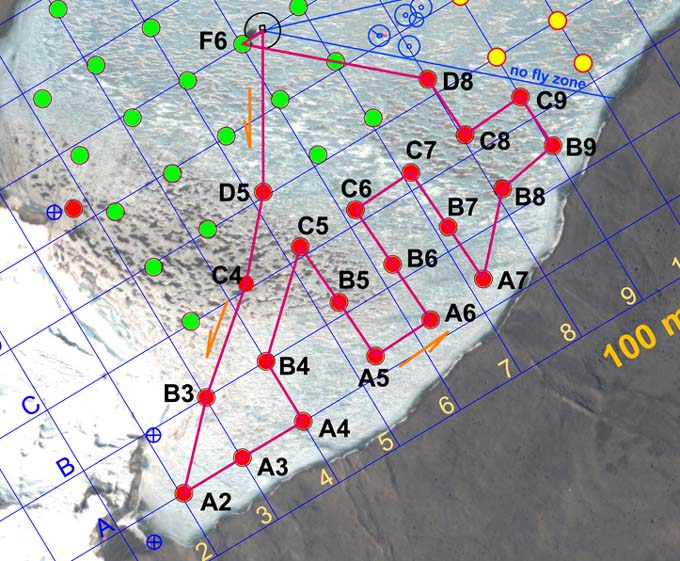
Mission plan for November 16 called for another ambitious sonde cast run to clean up the southwest quadrant of the lake.

Kristof preps the pH sensor on the sonde before launch.
Vickie locks in on the bot position for the 22nd sonde cast of the day.

SAS engineer Bart Hogan leaves the valley after six weeks on the ice.
Sonde cast progress at the conclusion of the November 16 mission.
Monday
November 16, 2009
We awoke to the sound of tents fluttering madly in 25 knot + winds - katabatics coming down the valley. The temperature rose to 3C (37F). Bill prepared the mission plan this morning, an ambitious 22 sonde casts to mop up the entire southwest quadrant of the lake. While this was underway Vickie pulled the sonde flags from the November 9 and 11 missions and she and Rachel re-labeled them for today's run.
Meanwhile, the strong winds played havoc with our melt hole wind screens, lifting up and tossing heavy ballast ice into the hole that had been piled on the sheets. Vickie and Kristof went to work and re-anchored the ends of the flaps (seen as the yellow colored panels on the four sides of the moon pool access port in previous photos) using ice screws and some clever rigging tricks Vickie had picked up on other expeditions.
Project PI, Peter Doran, arrived on a helo flight at 11am, in time to participate in the team meeting. By 12:33pm the vehicle was underway. It returned at 6:35pm in a textbook mission, acquiring all 22 casts: D5, D8, C4, C5, C6, C7, C8, C9, B3, B4, B5, B6, B7, B8, B9, A2, A3, A4, A5, A6, A7, and F6 without incident. The latter station is included in all missions as a time varying measure of lake activity over the season. Total distance traveled underwater today was 2.7 kilometers with an in-water run time of 6 hours. We still had more than 40% power reserves at the conclusion of the mission.
After being with us during the tedious start-up phase for six weeks, SAS chief engineer Bart Hogan began the long return to the US and his family today, hopefully arriving in time for Thanksgiving. Given the substantial changes and improvements made to the hardware and software on ENDURANCE over the past year, Bart's presence on the field team was of enormous benefit. Thanks Bart!

John Priscu hands out crepes in the Jamesway.

Shilpa, Emma, Chris, Bart, Kristof, Vickie, and Chris's creations "Frostie Boy" (left) and "Dr. Stone." By the time Chris got to work most of yesterday's snow storm had ablated.
Sunday
November 15, 2009
Most people did not get to bed until 3 or 4 am so it was a welcome sight to find John Priscu up at noon cheerily making crepes for everyone who walked in the door of the Jamesway at East Lake Bonney. Today was an off day. Many people caught up on their blogs ... a luxury since our science days here are excessively long and most people are dog-tired by the time dinner is over. Somehow sitting down to write at 2am after 18 hours on your feet is difficult. A tent and sleeping bag seem more appealing. It was also a chance to look through data from the past several days at a less break-neck pace.
Shilpa, John, and Emma eventually went on a hike up to the ventifact field some 600 meters vertically above camp. Kristof went for a run along shore to the east. Chris built two snowmen (given the rare snow storm of yesterday). Vickie read Memoirs of a Geisha. In training, Bill did 155 pushups. Most watched an "Austin Powers" film following dinner.
Blog entries from previous weeks
can be found below:
November 8 - 14, 2009
November 1 - 7, 2009
October 6 - 31, 2009
Personnel:
Dr. Peter Doran is the
Principal Investigator for the Endurance
project. He has been studying the lakes in the Antarctic Dry Valleys
for 15 years and is a professor at the University of Illinois, Chicago.
Dr. Bill Stone is a
Co-Investigator for Endurance. He is also the
president and CEO of Stone Aerospace, the engineering company that
designed and built the Endurance vehicle.
Dr. John Priscu is a
Co-Investigator from the University of Montana. He
has been studying the lakes in the Antarctic Dry Valleys for over 20
years.
Bart Hogan is a mechanical
engineer for Stone Aerospace.
Dr. Kristof Richmond is a
programmer for Stone Aerospace, focusing on
navigation.
Shilpa Gulati is a programmer
for Stone Aerospace, focusing on the
system executive and machine vision. She is also a PhD student at
University of Texas, Austin.
Chris Flesher is the vehicle
manager, programmer, and electronics
technician for Stone Aerospace. He is a Masters student at UT Austin.
Rachel Middleton Price is an
electronics
technician for Stone Aerospace.
Vickie Siegel is chief vehicle
technician and logistics manager for Stone Aerospace.
Maciek Obryk is a graduate
student at the University of Illinois at Chicago.
Emma Steger is the Lake
Bonney camp manager.