
Realistic Cross-Platform Haptic Applications Using Freely-Available Libraries
March 1st, 2004
Categories: Applications, Architecture, Data Mining, Devices, Education, Networking, Software, Supercomputing, Visualization
Authors
DeFanti, T., Banerjee, P., Luciano, C., Mehrotra, S.About
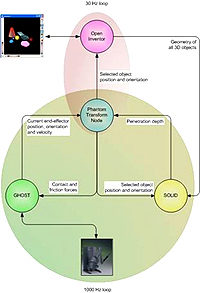
This paper describes the development of a generic framework for implementing realistic cross-platform haptic virtual reality applications. Currently, freely available Software Development Kits (SDKs) deal with a single Haptic Interaction Point (HIP), i.e. the tip of the haptic probe. However, many applications as path planning, virtual assembly, medical or dental simulations, as well as scientific exploration require object-object interactions, meaning any part of the complex 3D object attached to the probe collides with the other objects in the virtual scene. Collision detections and penetration depths between 3D objects must be quickly computed to generate forces to be displayed by the haptic device. In these circumstances, implementation of haptic applications is very challenging when the numbers, stiffness and/or complexity of objects in the scene are considerable, mainly because of high update rates needed to avoid instabilities of the system. The proposed framework meets this high requirement and provides a high-performance test bed for further research in algorithms for collision detection and generation of haptic forces.
Resources
Citation
DeFanti, T., Banerjee, P., Luciano, C., Mehrotra, S., Realistic Cross-Platform Haptic Applications Using Freely-Available Libraries, Proceedings of the 12th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, in conjunction with IEEE Virtual Reality 2004, March 1st, 2004.