
Passive Haptic Feedback for Object Manipulation in Virtual Reality
December 31st, 2018
Categories: Applications, MS / PhD Thesis, User Groups, VR, Mixed Reality
Authors
Mantovani, F.About
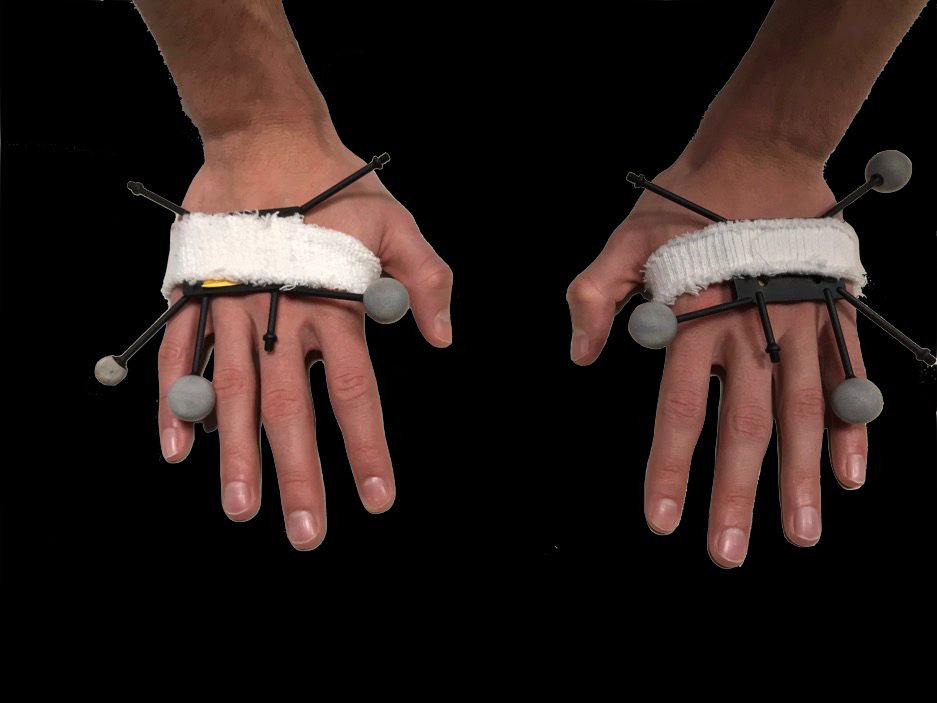
Thanks to technological advancement and lower priced head-mounted displays, Virtual Reality is becoming popular in the consumer market. One of the main aspects on which researchers are focusing on these days, besides increasing the resolution of the displays, is finding a way to interact in a way that is as similar as possible to the real world. In this document, we will first analyze some previous work done in the field. Then, we will show our implementation of a passive feedback system which uses real objects to augment virtual reality experiences. The system will be used on two different sets of real objects. The first is composed of the exact replica of the objects present in the virtual environment, the second is composed of objects with several levels of mismatched physical characteristics. The document will then explain in detail the integration of the system in VR applications using Unity.
In the second part of this document, we will describe a user study to compare the execution of object manipulation tasks with the system that we developed to two other state-of-art input devices: Leap Motion and VR Controllers. We will analyze the factors of the task execution in virtual reality, such as the accuracy, velocity, time to execution, level of realism and immersion, and we will compare the results with the execution of the same task in the real world. Finally, we will give suggestions on how to enhance our system in future work.
Resources
Citation
Mantovani, F., Passive Haptic Feedback for Object Manipulation in Virtual Reality, Submitted as partial fulfillment of the requirements for the degree of Master of Science and Computer Science, Graduate College of the University of Illinois at Chicago, December 31st, 2018.