



Lake Bonney Expedition 2009
The second deployment has been successfully completed.
Full details are available at the
Stone Aerospace ENDURANCE 2009 Blog.
You can learn more about current events from Kristof Richmond at
Kristof's blog
and from Emma Steger at Emma's
blog and from Shilpa Gulati at
Shilpa's blog.

Chris supervises the carving of the Thanksgiving turkey at East Lake Bonney camp.

The team digs into a fine meal. Clockwise from left: Emma, Vickie, Chris, Rachel, Peter, Kristof, Shilpa, Bill.
Saturday
November 28, 2009
Mission Objective: recover, process data, go on hikes, eat lots of food.
This was our "Thanksgiving" day (the real holiday had passed several days ago while we were in the middle of key missions that we wanted to get under our belt before taking another break). Everyone slept in. The crew was up around 11am. Peter worked on his December 6 lecture back at McMurdo station. Doing similarly, Bill reduced data for the narrows and the November 26th glacier exploration to generate cross sections and movies for the lecture.
Several people went on hikes - it was a beautiful sunny day with little wind, a rarity for Taylor valley. Bill and Vickie hiked 3 kilometers past the east end of East Lake Bonney. They met Shilpa and Emma on their way back after having retrieved an ATV they had left at the east end of the lake. When they returned they found the vehicle pointed in the reverse direction from where they had left it. This was Shilpa's practical joke. The four of them rode home together on the ATV. Meanwhile, Kristof hiked to the ventifacts, descending to the east end of the lake and then jogging back to camp.
Dinner was on at 5:30pm - way early for us - and there was lots of it: turkey, gravy, dressing (both vegetarian and meat), peas, corn, roasted veggies, kumara (New Zealand sweet potatoes), croissants, and pumpkin and cherry pies, all fresh baked by the team.

Solar ablation on the east side of the bot garage foundation left a 50 mm vertical gap between the support beams and the upper structure, possibly explaining the difficulty we had been having of late with moving the loaded gantry inside the lab.

Fixing the foundation problem amounted to a few turns on the leveling jacks spaced about the outer perimeter of the lab. Here the 50 mm gap we discovered in the morning has been closed up.
The longest mission yet for ENDURANCE was relatively simple in geometry: proceed straight to the south side of the lake and follow the perimeter around, scanning the shoreline from an 80 meter standoff radius. This resolved a long standing debate that had gone on regarding how to effectively capture the shallow portions of the lake bathymetry. In shallow water the imaging sonar, pointed in down-look mode, was inefficient because there was not much distance below the keel of the bot for the beam to fan out. So we would have had to make a very large number of concentric passes in this fashion to ensure we had measurement data over these areas. But if we inverted the problem and scanned from the side, we could cover the entire problem area in one pass. The 80 meter standoff distance was chosen because this had proven to be a maximum range for the imaging sonar before we began seeing noise in the data. The objective was both uniform as well as quality bathymetry data.
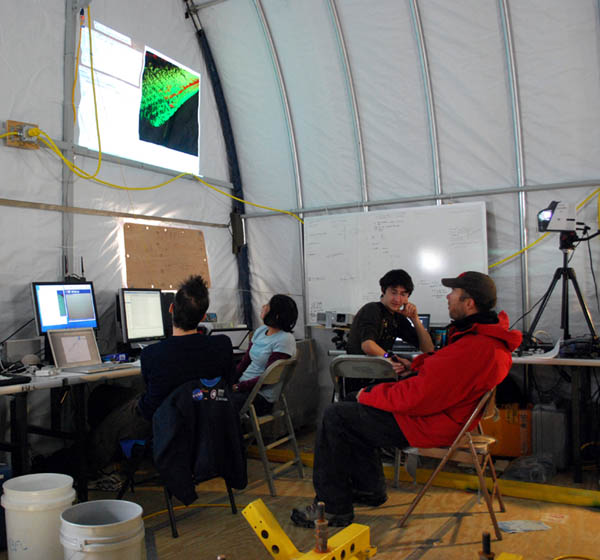
In Mission Control, Kristof (left), Shilpa, Chris, and Peter monitor, but don't interfere with, the independent actions of the bot. The 5 hour, 3.6 kilometer mission proceeded without incident.
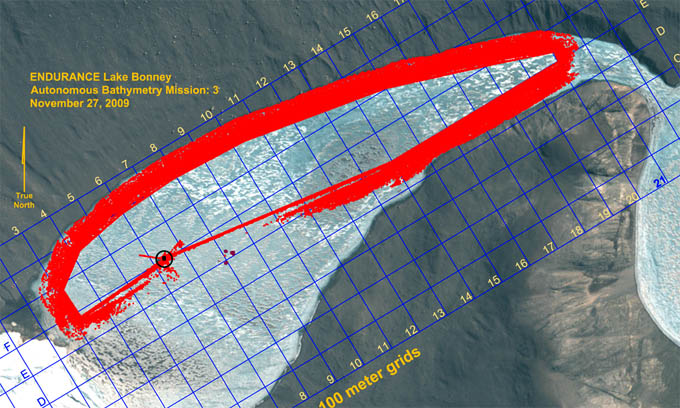
Results from Autonomous Bathymetry Mission 2: a total of 34 million measurements along most of the lake shoreline. Internal gaps in the data will be filled in during the next four missions.
Friday
November 27, 2009
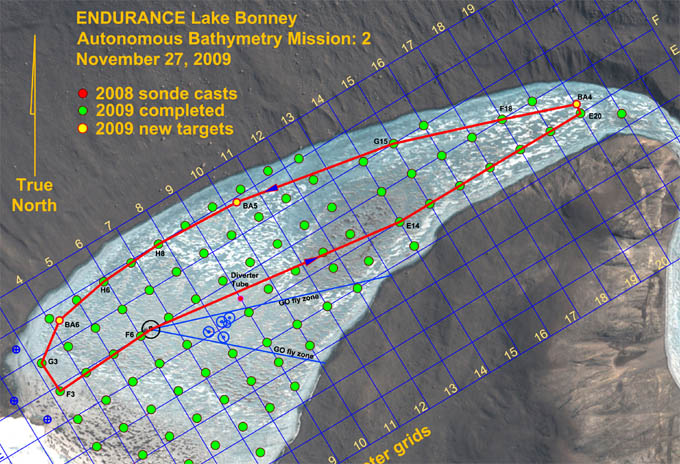
Mission Objective: Acquire lake edge bathymetry around the south side of the lake to the narrows at Bonney Riegel and then return via the entire north shore.
We were up at 8:10am to overcast skies. It was relatively warm (for Antarctica). The thermometer on the Jamesway read 7C but no one believed it since it was in direct sunlight. The wind chill on the ice felt much colder. But the sun was having an effect on the lake ice on the south side edges and our normal ATV route had become dangerous. We crossed the main bulk of East Lake Bonney directly to the north and then rode the much smoother, harder edge "moat" ice from there to the lab.
The sun had also affected the bot garage lab, ablating the edge ice and dropping the foundations on the east side of the structure. We periodically inspected this - in a single season a third of a meter of ice ablation was not unheard of here - and today found 40 mm gaps along the middle east side edge beams. Fortunately, we had known about this effect in advance and the foundation was equipped with industrial screw jacks, which we now activated to level up the lab.
By 11am the mission plan was generated, the IMU aligned, and the launch checklist well underway. This would be the most ambitious mission yet in terms of traverse length. The multi-beam sonar imaging system was again set up in side-look mode. No special physical arrangements were needed to do this. ENDURANCE is axysymmetric, so it is directionally-insensitive. So to map the side of the lake while moving forward we simply rotate the vehicle 90-degrees to the velocity vector and the onboard coordinate system transformations are automatic. At 11:55am the bot was in the water and on its way on autonomous bathymetry mission 2. At 5pm the it returned to the melt hole in one pass from the western end of West Lake Bonney without any additional search, discovered the central alignment beam and surfaced directly. The water was clear enough to see the vehicle at -5m as it returned. There were no incidents on the entire mission. There was no intervention from the team. Mission duration was 4 hours and 50 minutes with a trajectory length of 3.6 kilometers. A total of 34 million valid (non-noise / non-multipath) bathymetry measurements had been made and logged. This left only selected gaps in coverage across the lake which we felt could be covered in no more than four additional missions.
The crew was back at the ELB Jamesway by 6:30pm... a short day by our recent standards. Total automation can be boring sometimes.
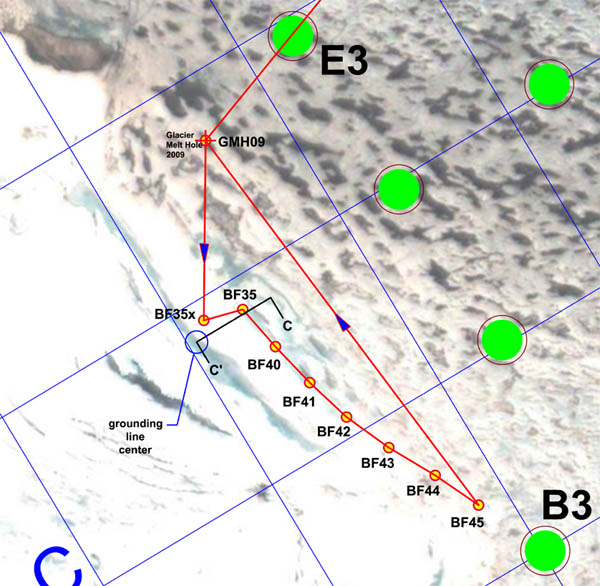
The first portion of the November 26 mission involved close-in exploration of the underside of Taylor Glacier, in an effort to locate the grounding line between the glacier and the lake sediment. The bot was re-ballasted to 85 kg negative at the surface at GMH09 and released to approach the underside of the glacier. The furthest penetration of the imaging sonar underneath the glacier occurred just south of BF35 at Section C-C' and showed a 30 meter deep overhung recess.
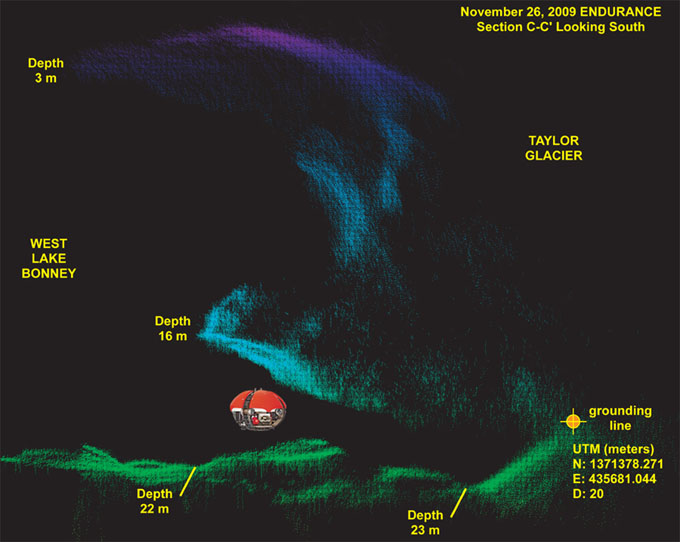
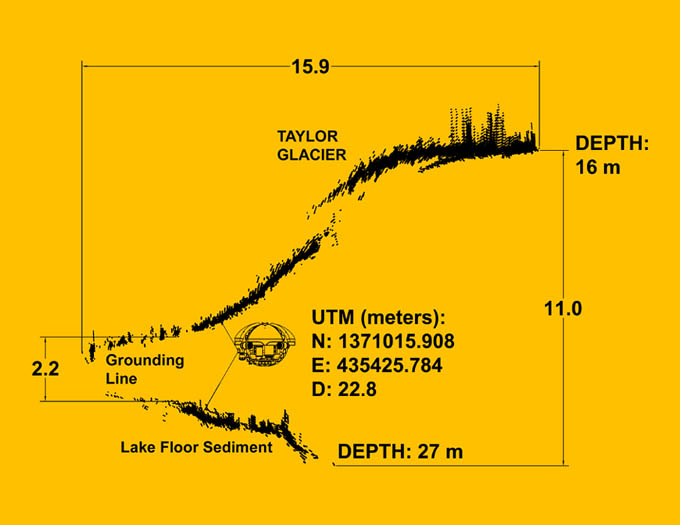
This is a plot of a 10 meter thick imaging slice of Taylor Glacier, looking south, taken along Section C-C' (see the mission plot). East is to the left; west to the right. It clearly shows the grounding line beneath Taylor Glacier (which shows up mainly as blue and purple in this depth-cued plot). The lakebed and moraine sediments show up as green. The vehicle is shown to scale at the point of closest approach west of BF35. This figure also shows the presence of a concave ledge in the glacier face just above the chemocline (which starts at approximately 14 meters depth). This is typical along the central portion of the underwater glacier.
This high-resolution image of the moraine lake bottom sediment was taken by the Sonde down-look camera during an auxiliary cast of opportunity at BF35x.
This is a close-up view - taken by the forward imaging camera - of the overhang beneath the glacier at a depth of -16 meters along Section C-C'. The overhang continues for 30 meters to the west before the lake floor sediments rise to meet the ice at the grounding line.
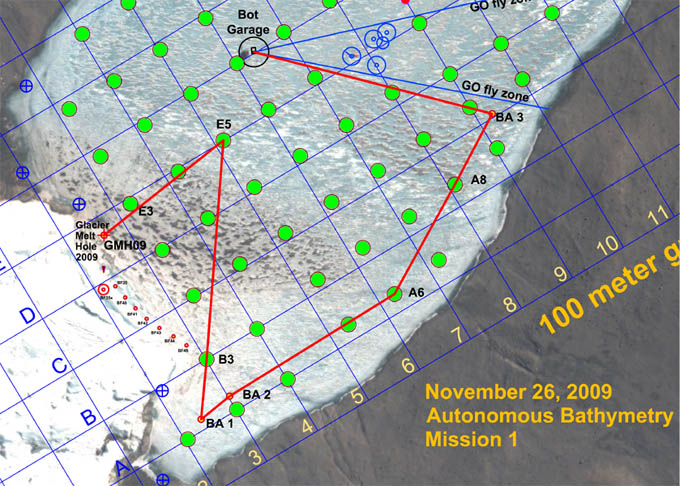
Bathymetry Mission 1 was uploaded to the vehicle while it was traveling enroute to E5 from GMH09. The bot went fully autonomous at 6:12 pm and conducted a scan of the southwest shore of West Lake Bonney, returning on its own to the main lab melt hole at 8:30pm.
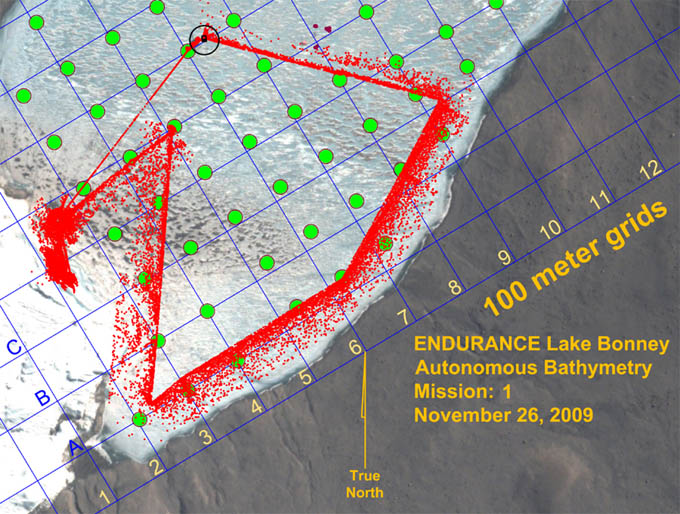
Results of the lateral bathymetry scan, plotted at a decimation factor of 100 (that is, only 1 point in 100 of the actual data is plotted here to show typical patterns of coverage). The system acquired good bathymetry (lake bottom topography) data all the way out to the grounding line between the lake ice sheet underside and the lake bottom. Ice thickness remained approximately 3 meters all the way to shore.
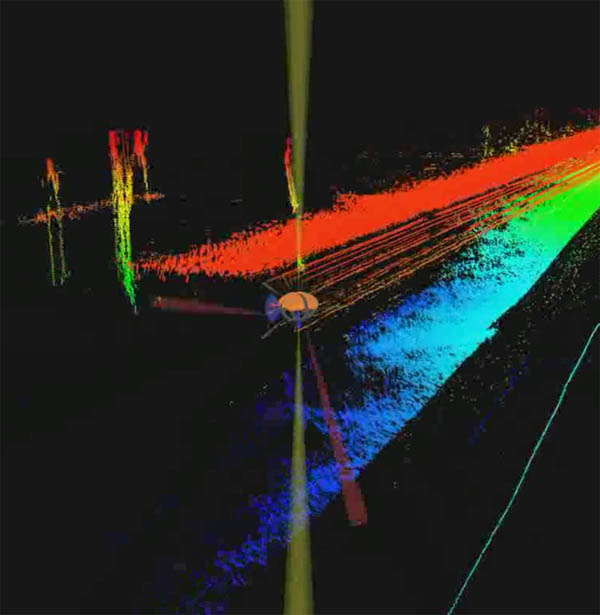
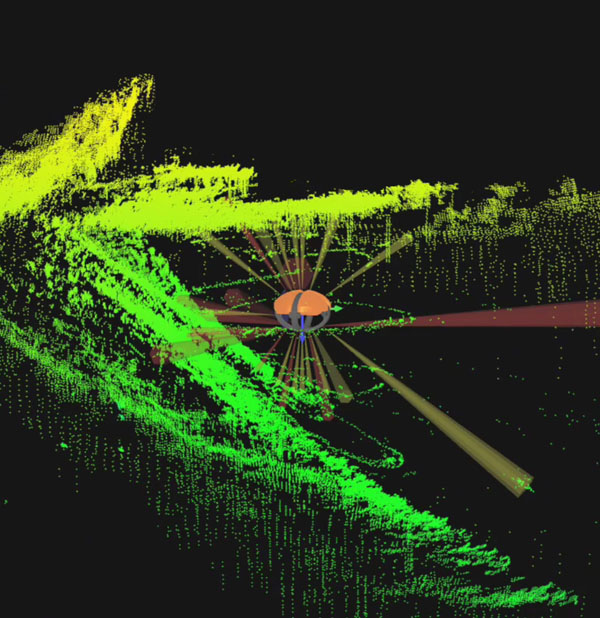
Frame capture from the situational awareness 3D visualizer shows that the bot cleanly imaged the locations for the existing permanent NSF LTER experiments (to the left of the vehicle track) located at the center of West Lake Bonney. The largest cluster is in fact a group of four 6 mm cables that suspend a series of sediment traps, used to monitor materials that may seasonally enter the lake, either through the ice cap through ablation and melting or from glacial melt coming in from the end of the lake and flowing atop the chemocline.
Thursday
November 26, 2009
Mission Objective: Investigate in greater detail the grounding line voids underneath Taylor Glacier and below the chemocline. Pending the early conclusion of the first mission, generate a second mission plan on the fly and run an autonomous shore bathymetry scan of the southwest quadrant of West Lake Bonney.
The crew was up at 7:20am and off to the lab by ATV at 9:15am. Kristof and Bill worked the 3D glacier geometry data from yesterday's scans to select a target point for the start of today's close-in glacier contact imaging. By 1:50pm the bot was in the water and on its way to GMH09. New ballast calculations performed by Chris and Bill using yesterday's test data, combined with the geometry data from yesterday, indicated we would need to re-ballast to 85 kg negative at the surface to be neutral at 18 meters below the glacier lip at the chemocline. By 3pm the bot was at GMH09 and the trim weights were added and the vehicle released.
At 4pm the bot discovered a cave going back under the glacier just south of BF35 for more than 30 meters (see Section C-C' figure). It was too small to drive into, unfortunately. Similar investigations south towards BF45 indicated closure between the lake floor sediments and the underside of the glacier at less than 30 meters west of the main overhang at the chemocline, so it was apparent that no sub-glacial borehole existed. The multi-beam data from today and yesterday produced high-resolution imagery back to the grounding line across the entire central portion of the glacier (between the north and south moraines).
By 5:50pm the bot was back to GMH09 and the sub-chemocline ballast was removed for the final time. Given that fiber snag problems had occurred several times this year in the vicinity of B3 we plotted an evasive trajectory back to E5 before heading to the southwest shoreline for bathymetry scanning. By 6:10pm the new mission code was uplinked to the vehicle while it was enroute to E5. At 6:12pm the bot went fully autonomous for the remaining 3 hours of the mission. The standoff range was 80 meters from shore. The bathymetric scan proceeded rapidly and smoothly with complete coverage to the grounding line between the West Lake Bonney ice cap and the lake floor. The coverage was high definition with 4 multi-beam scans per second (480 measurements per scan) and the vehicle running at 0.29 meters/s. At 8pm the vehicle turned the corner at BA3 (see secondary mission plan figure) and headed towards home. We were receiving much more detail of the lake bottom than anticipated considering the side-look orientation of the imaging sonar. At 8:30pm the vehicle crossed within range of the LTER limnological test site and captured a complete 3D map of the location of all of the suspended cables there (see figures). Considering that most of those cables were only 6 mm in diameter this was an impressive confirmation of the obstacle detection system. At 8:30pm the bot autonomously located the melt hole and rose to a cheering crowd. We were packed up and headed home with another load of data at 10:30pm.
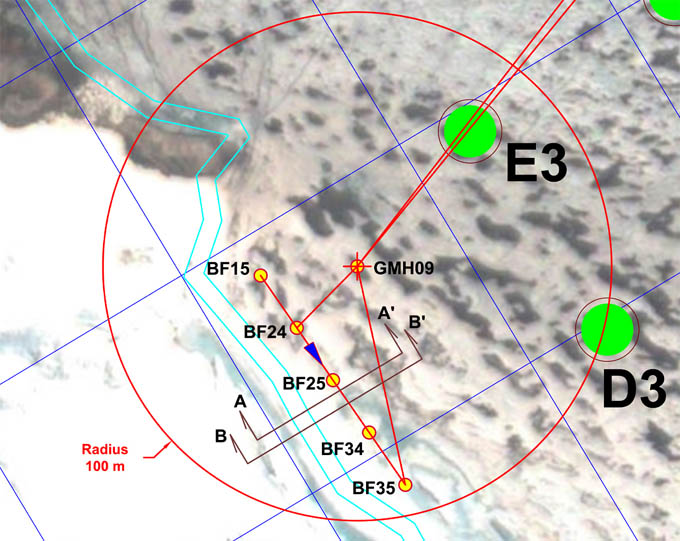
Mission plan called for the bot to surface at GMH09, load up on ballast, then maneuver to pre-points BF15 through BF35 and from there to make tentative perpendicular excursions under the glacier to the west, leaving a straight egress path to the melt hole. The multi-beam data from Sections A-A' and B-B' are plotted in the subsequent figures.

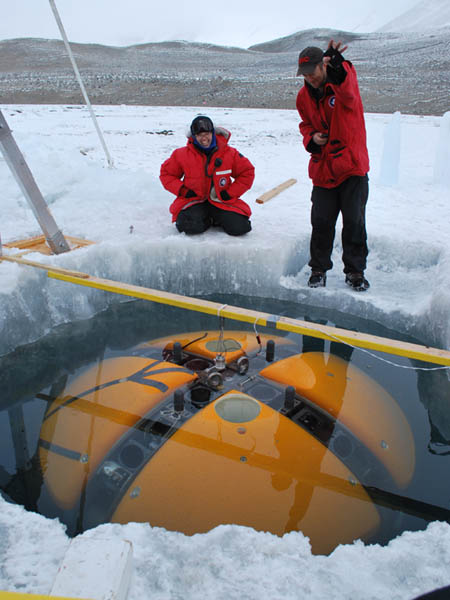
The ice team awaits the arrival of ENDURANCE for re-ballasting for the first sub-chemocline mission. Taylor Glacier forms the backdrop, just 30 meters behind melt hole GMH09.
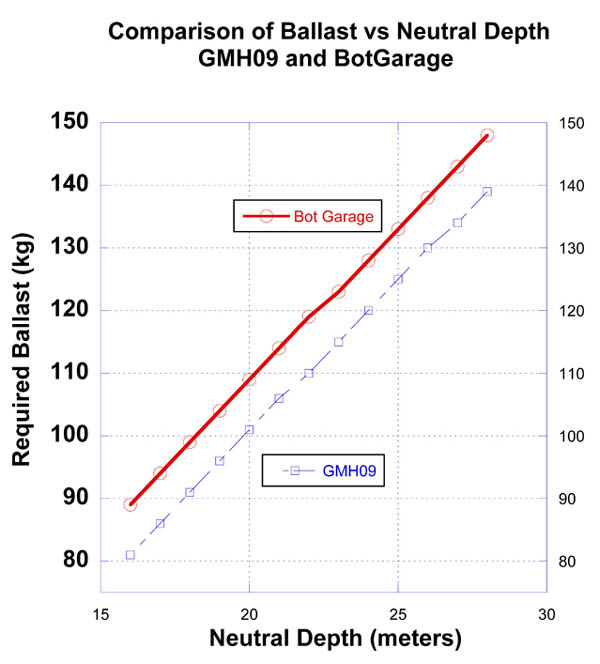
New ballasting data acquired today at GMH09 showed a striking offset from the data originally gathered at the bot garage melt hole several days earlier. The consensus is that fresh water entering from underneath the glacier is locally mixing and slightly reducing the salt content of the chemocline at this locality.
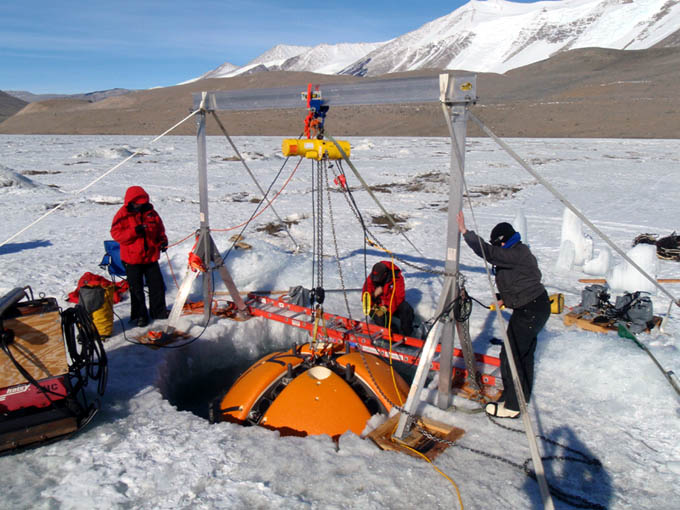
Getting down to the business of negatively ballasting the bot. The overhead 1-ton gantry is just barely strong enough to get the vehicle 2/3 out of the water - but high enough to add the additional 105 kilograms of lead to sink the vehicle to 21.2 meters depth, 7 meters below the chemocline layer.
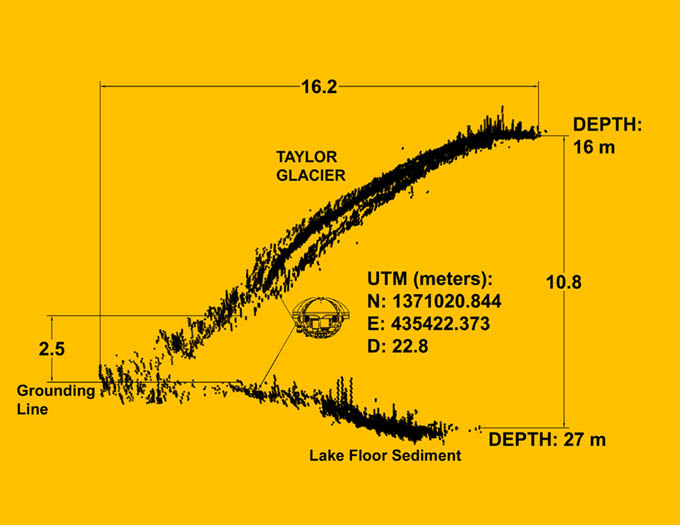
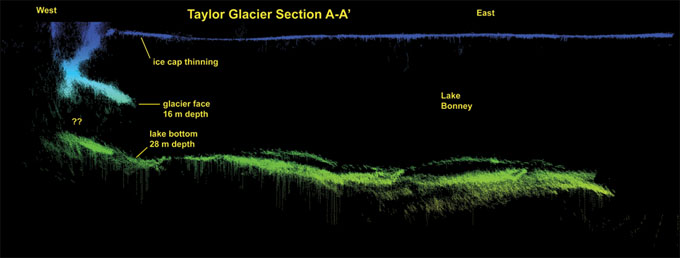
Section A-A' (see mission plan above) shows a multi-beam 2-meter-thick slice of the underside of Taylor glacier, below the chemocline. Above 16m depth (to the right) the glacier face rises above the chemocline to the Lake Bonney ice sheet roof. Generally there is a concave cusp above this level (see the multi-beam image for November 26 that shows this well). The "grounding line" is where the glacier ice mass rests in contact with the moraine sediments. It is along this line that the anomalous cold water source localized yesterday is presumed to originate.
Section B-B'. Similar to the previous section but further south along the glacier face. ENDURANCE had a hard obstacle standoff limit of 1 meter of overhead space and 2 meters under keel for maintenance of navigation and image sensor reliability. The vehicle cross section is to scale and is located at the actual closest point of approach to the grounding line in this location.
Wednesday
November 25, 2009
We were up early at 6:20am catching up on data processing and planning for today's mission under Taylor glacier. The internet remains down and the tops of the surrounding peaks are still obscured in fog and snow. The mission plan (see figure) was conservative, given the absolutely unknown nature of what lies below the chemocline and underneath the glacier. The bets amongst the team as to what the bot would discover ranged far and wide from "a continuation of the vertical glacial interface wall straight to the bottom of the lake" to "a vast sub-glacial tunnel" extending westward under Taylor glacier.
By 2pm the bot had autonomously surfaced at GMH09 and the crew, led by Vickie, went to work adding a series of ballast test loads to the vehicle to confirm the previous calibration done at the bot garage melt hole several days earlier. The first measurements suggested that there was a problem - the bot was sinking further than it did at the main melt hole. We therefore set about running another calibration run since it was certain that the bot was going to have to be ballasted to a precise depth once we got the first multi-beam data that showed where the best approach depth would be to get under the glacier. Within the chemocline we had limited vertical excursion capability. Even at full upward or downward thrust we would be limited to about a 6 meter rise or descent, all the while potentially stirring up bottom sediments. So the concept was to precisely ballast at the depth of interest and set the bot free for horizontal exploration. Here are the data we acquired today:
| Ballast Load (kg) | Depth Reached (meters) |
| 85 | 16.90 |
| 88 | 17.20 |
| 90 | 17.64 |
| 91 | 18.01 |
| 105 | 21.20 |
| 118 | 23.40 |
We finally ballasted at 105 kg of additional lead, which took us to a neutral depth of 21.2 meters. With all systems go the melt hole team radioed back to mission control that the bot was free and descending into the chemocline and they began a close approach to the original BF15 - BF35 line (see mission plan). Because of the bot's depth (at 21.2m) and the rising moraines to the north and south we were unable to reach BF15 without violating the ENDURANCE under-keep minimum depth. The deepest lake bottom depth recorded in this zone was 27 meters, so there was not a lot of maneuvering room. For the same reason we were unable to reach BF35. But, within that line we were able to sweep the face of Taylor glacier to the bottom with clean line of sight.
ENDURANCE moved up close to the nose of the glacier at BF24 to try to get images of the grounding line. However, we were ballasted too heavy and the down-look cameras on the Sonde showed that we were beginning to stir up lake bottom sediment with the vertical thrusters attempting to maintain minimum standoff under-keep clearance so a retreat was ordered. We then cautiously moved southeast and again moved in close to the glacier about midway between BF25 and BF34, and midway between B34 and B35. The further southeast we went the shallower the lake floor / moraine deposit became. Based on this data it seemed clear that the ideal ballasting depth would be about 19.2 meters, and we made a note of that for tomorrow's closer proximity explorations.
The bot's multi-beam imager brought back a treasure trove of clean 3D map data (see Section figures A-A' and B-B' for a sample of some 2 meter slices of the data taken between BF25 and BF34). Unfortunately for those who had wagered on the presence of a vast sub-glacial cavern, there was no borehole leading off into the unknown. But there was plenty to be investigated further once we had the right neutral approach depth to minimize disturbance of the grounding line sediment. We auto-docked back to the melt hole around 9pm, removed the excess ballast, released the bot and it returned home for a second autonomous docking and ascent at a mission clock time of 7 hours and 26 minutes underwater. It had been a good day. We had pulled off a dangerous exploration mission and did not lose the bot. Tomorrow we will return for close-in visual imaging.

The afternoon view of the bot garage and the southern flank of Mt. J.J. Thompson from GMH09.
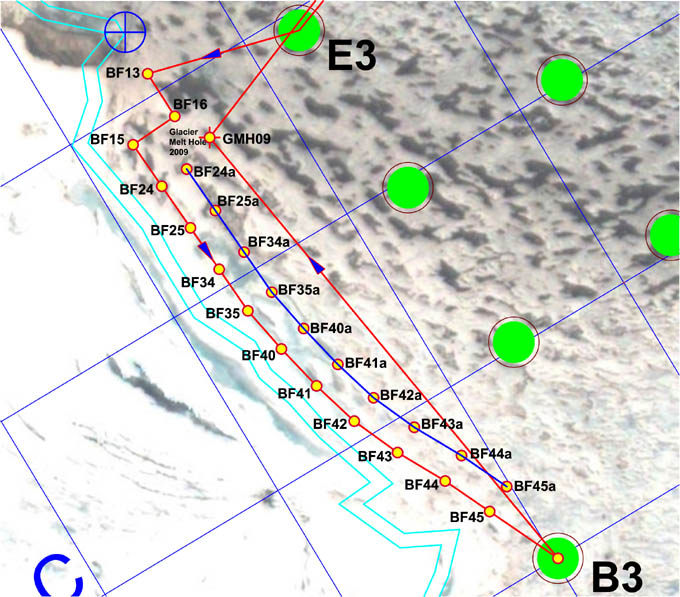
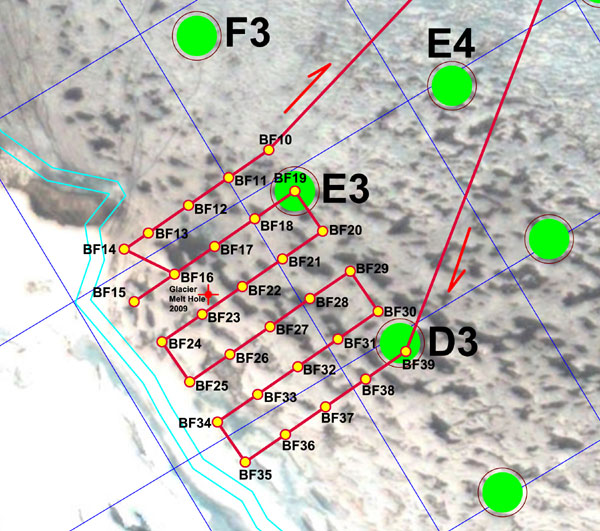
Mission Plan for November 24, 2009. The outbound trajectory goes through waypoint E3 as a tracking check then to the glacier face proximity points BF13, BF15, BF24 ... BF45. Because the anticipated stand-off distance was less than 10 meters from the glacier we constructed a fall-back trajectory (BF24a ... BF45a) in case an unforeseen obstacle appeared. The vehicle periodically swept the forward and westerly (left) pathway with multi-beam to guard against any surprises. The vehicle never had to deviate from the red path, ultimately converging at GMH09 for the first underwater traverse and surfacing at West Lake Bonney.
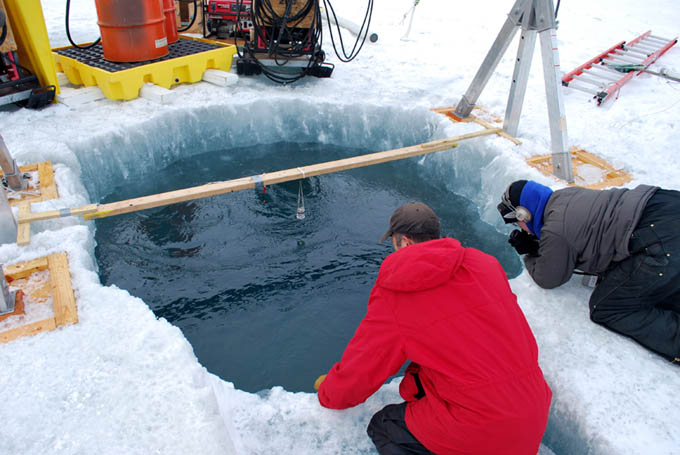
Peter Doran and Vickie Siegel anxiously await the arrival of the bot at GMH09, just 30 meters from the glacier face. The 2x4 across the melt hole supports the collimated alignment beacon. Shimmering on the water surface is from thruster centering action of the bot as it rises up through the 4 meter thick ice cap.
Peter Doran waves hello to the crew back in mission control (the upward looking machine vision camera has a wide field of view and can easily see both Peter and Vickie).
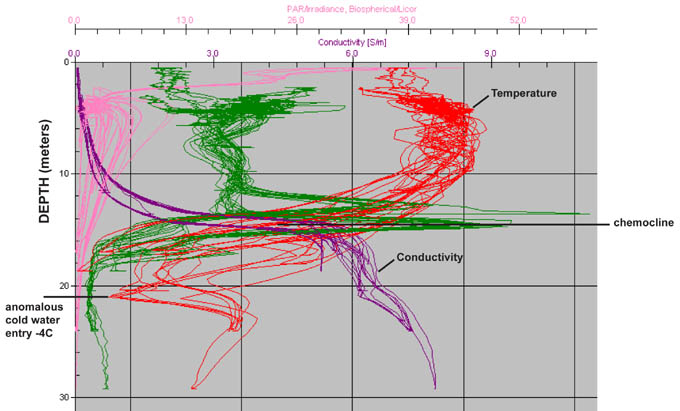
Chemistry profiles from the Sonde instrument package in the refined cast zone near the glacier. These indicate an anomalous cold water source originating somewhere along the glacier line at a depth of 21 meters. Later work would locate an even colder source at -5C near BF45a.
The bot scans the upper face of underwater Taylor glacier at its interface with West Lake Bonney. The lowest green returns to the right show the lip of the glacial under-hang at the chemocline. The next two missions will explore underneath this ledge.
Tuesday
November 24, 2009
The team was up at 9am. A little over a centimeter of dusty snow had accumulated over the night and it was dark and overcast, unusual for the Valley. The surrounding peaks were obscured in snow and clouds. The internet link was down. Helo ops were cancelled today. Neither supplies nor personnel would be making their way towards Lake Bonney.
The plan for today was to run a horizontal sweep of auxiliary sonde drops at 25 m spacing along the glacier face from north to south at about 10 m standoff from the ice wall in order to obtain a more exact locality for the mystery source of cold water that had been detected in the fine grid. The grid casts of the last three days had indicated that a pronounced cold source was coming in at around 21 meters depth from somewhere south of the BF35 to BF39 line. The presumed source was from the glacier grounding line. Our job today was to find the low point in temperature along that line.
By 10am Peter and Emma were off to GMH09 to start the Hotsies in a final effort to assure the glacier melt hole would be ready for use later in the day. The main crew reached the bot garage at 11:10am and began work on the mission plan. By 4pm the Bot was in the water and the glacier melt hole team reported the site was ready for arrival.
The mission proceeded smoothly until around 6:39pm, outbound about midway between BF15 and BF45, there was an apparent fiber snag. This was rough terrain under the ice in this location, as we had learned last year. Shilpa momentarily over-rode the mission sequence and caused the bot to dive a few meters (still above the chemocline). This evasive maneuver was enough to free the fiber and we resumed the mission at 6:50pm. At 7:30pm an auxiliary sonde drop mid-way between B3 and BF45a produced the lowest recorded water temperature reading in West Lake Bonney: - 5 C (23F) [at UTM N: 1370881.271; E: 435585.644 meters]. The navigation system was performing well. Real-time GPS acquired by Vickie and Bill had shown a horizontal error (including ice picking) of less than 1 meter at E3 on the inbound journey and 0.8 meters at B3 just before the low temperature measurement.
At 8:30pm ENDURANCE completed the first "through-trip" in West Lake Bonney and surfaced at the glacier melt hole, GMH09. By 10pm the bot had completed autonomous recovery back at the lab and the entire crew was enjoying dinner before 11pm, an early night. With the successful completion of the localization and auto-docking and with the melt hole completed we were now ready for the sub-chemocline exploration of Taylor glacier.
The mission plan for November 23, 2009 involved a clock-wise repeat (in reverse order) of the November 21 mission to recapture the sonde casts between BF15 and BF39.

Rachel replaces the fuse on battery stack A.

John Priscu begins the investigation into the clogged water pump on the Sonde instrument package.

Vickie locks in the GPS coordinates for sonde cast BF39, start of the fine grid sonde casts for today.
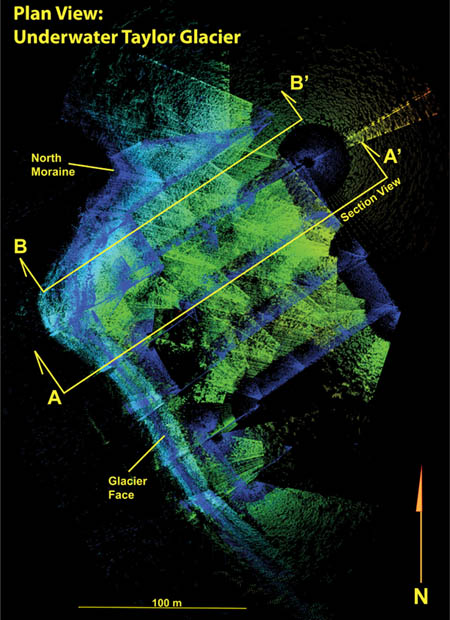
While conducting the sonde casts we also programmed in yaw-rotational sweeps of Taylor glacier in preparation for the upcoming sub-glacier exploration. This plan view shows the edge of the glacier (in bright blue) along with section lines for the next two profile images. All of these were created using the multi-beam imager mounted in the forward-looking position.
A multi-beam side-look view of the north Taylor glacier moraine under the Lake Bonney ice cap.
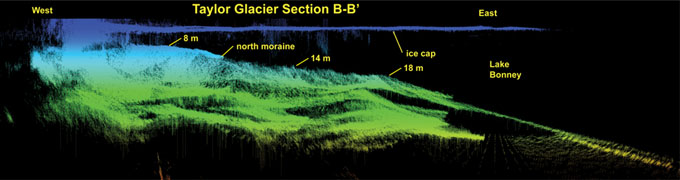
Multi-beam sectional image of Taylor glacier beneath the Lake Bonney ice cap. Note the undulation of the lake ice thickness and the thinning as it approaches contact with the glacier (due to warm water run off from the glacier as summer begins to arrive in Antarctica). The main object of interest is the dark gap under the ledge at 16 meters depth. To see further, the bot has to be ballasted to descend below the chemocline, and will be the subject of the next few missions, now that GMH09 (the glacier melt hole) is open.

More diesel fuel for the Hotsys arrives to complete the melting of GMH09.
Monday
November 23, 2009
The team was up at 7:20am discussing the mission plan. John Priscu requested a synoptic fine grid measurement, meaning essentially that we would need to re-run as much of the original 39-cast grid as possible. Given that at least 14 of the previous casts were good (BF1 to BF14) we decided to invert the mission trajectory and would target BF39 as the first cast for today (see figure).
By 10am the team reached the bot garage and began working up the mission plan and going down the pre-launch checklists. We suffered a minor setback during the morning battery top-off charging when one of the parallel high power amp systems was connected to a battery with reverse polarity. The battery promptly shut down on that system (the protective circuitry worked). It was not software re-bootable. There was an immediate conference and the consensus was that the internal battery fuse had blown. Vickie and Rachel pulled the battery housing from the vehicle and disassembled it on the workbench. A 35 amp fuse solved the problem and both batteries were back on charge by 2pm. Labels were installed on the charging cables to preclude a future error.
Meanwhile an investigation of the SeaBird water pump used on the Sonde sensor suite proved that it had indeed been clogged, although it was not immediately evident from an external inspection. John, Vickie, and Chris disassembled it and found a small piece of gravel blocking the impeller. By 4pm the vehicle was down-hole and passed both the ice-picking (positive buoyancy) test and a sonde test cast at F6 that John reviewed and found to be delivering valid data. With that the vehicle began a half hour traverse to the glacier. The protocol for today was slightly different than two days ago. We skipped the surface PAR measurements (John indicated he already had what he needed from that area) and only performed GPS-tracking at the grid end points. The data from the previous mission had been reduced this morning by Bill and found to indicate a 1.7 meter CEP navigation accuracy, including the effects of sliding (up to a meter or more) that occurs during ice picking stabilization (due to the uneven, sloping underside of the ice cap). This was repeatable enough accuracy that we did not need to ground-truth all casts today, just the ends of each scan line for a spot measurement check.
Vickie and Bill left the bot garage at 4:15pm to lock in the starting fine grid position for the vehicle at BF39. However, at 4:30pm, with the bot only a few tens of meters away from the radio location team, the navigation system crashed. Chris immediately confessed that he had, unbeknownst to everyone on the team until that minute, re-written the vehicle status monitor the previous evening and installed it to see how it would perform. It took close to half an hour after leaving the melt hole before a bug in the new code manifested itself and dropped the navigation system. Fortuitously, the bot was not far from fixed Sonde cast station D3, for which we had solid GPS coordinates. Thus, Bill and Vickie talked the mission control team in to the known point by providing guidance vectors to closure. When the bot was directly beneath D3 the coordinates were uploaded via the data fiber and the nav solution was back on track. Chris purged the new status monitor and re-loaded the prior version and we were back on the job.
Things proceeded smoothly for the next five hours until 9:20pm when the cast at BF10 again lost altimeter data in a particularly non-acoustically-reflective zone of soft lake floor sediment and momentarily touched bottom before mission control could issue an over-ride (they could see it happening on the sonde down-look camera). We discussed the portent of this in view of the previous loss of data update to those sensors (3 of them) that depended on the water pump and Peter made the call to end the mission. He had been monitoring the live data from the sonde instruments along the way and was pleased with the data. They had already indicated that the anomalous phenomena of interest (a previously unknown cold water source at -20 meters) was located further south and west from any of the remaining grid points (BF9 through BF1). Combined with the previous good casts from BF1 through BF14 Peter declared the data set to be complete and we issued the recall message to the bot. It returned at 9:55pm and completed autonomous melt hole detection and docking.
In parallel, efforts at GMH09 (the glacier melt hole) continued, with Peter, John, and Bill setting up the gantry crane over the hole and mounting the second electric winch. The hole now appears to be large enough to permit the bot to surface there.
The long ride back to East Lake Bonney camp continues to get longer as the moat ice begins to crack up, in some cases leaving 10 cm gaps where none existed when we first arrived. By 11:30pm the entire crew was back at camp working on dinner. It had been a day of success mixed with small glitches. Today we concluded that an investigation into the (now repeatable) Sonde altimeter spoofing under certain sediment conditions on the lake bottom needed a better-automated solution. With the sonde casts now complete and upcoming sub-glacier exploration and lake bathymetry pending, however, this became a side project that we vowed to return to before departure.
The impact of the internet on Antarctic scientist sociology. After 14 days without internet the team catches up on email. Clockwise from lower left: Emma, Vickie, Shilpa, Loralee, Jim, Kristof, John, Peter, Chris, and Bill.

Vickie stands atop a striking ventifact on a wide shelf of volcanic cinder some 500 meters above East Lake Bonney. In the background the pyramidal-shaped Matterhorn peak is at left center while Peak 1882 is to the right. The internet relay station for Taylor Valley lies atop the latter and any severe weather that blows through can knock it out for weeks. The only access is via helicopter and the maintenance crews must wear harnesses and clip into fixed ropes - the south face drops precipitously for over a kilometer immediately adjacent the relay box.
Sunday
November 22, 2009
Most members of the team were up by 11am (having gone to sleep around 4am) and congregated in the main Jamesway structure at East Lake Bonney camp. Today was a rest day for most given the non-stop pace of the past week. Also, after a long, long dry spell the internet was suddenly up... which had the effect of reducing what would normally be animated chatter around the breakfast table to a cluster of isolated, silent individuals intently staring at 10 separate laptop screens. Maybe it was better without internet?
Several people took long hikes up to the ventifact fields high above camp to the south. This is a plateau-like shelf some 500 meters vertically above the lake where wind-eroded, bizarrely shaped granite blocks sit atop a field of red and black colored volcanic clinker. There were still residual pockets of snow surrounding the ventifacts.
While those on the marathon sonde mission of yesterday took the day off, John Priscu, the recipient of the data, spent the entire day reducing the results of the 39 casts with 9 instrument logs per cast. At 10:20pm he turned from his work with a grim look on his face and announced that all data beyond station BF15 were compromised. Well, not all - just the ones that depended on the water pump to flush the sensors. Apparently the BF15 cast had plugged the CTD water pump when it touched the silt floor and although the readings looked nominally correct during the mission it was now clear that they had not been updated due to the clogged pump. The import of this message hit us all: we would have to re-run the mission for all stations beyond and including BF15. Not a good day for Team ENDURANCE.
Blog entries from previous weeks
can be found below:
November 15 - 21, 2009
November 8 - 14, 2009
November 1 - 7, 2009
October 6 - 31, 2009
Personnel:
Dr. Peter Doran is the
Principal Investigator for the Endurance
project. He has been studying the lakes in the Antarctic Dry Valleys
for 15 years and is a professor at the University of Illinois, Chicago.
Dr. Bill Stone is a
Co-Investigator for Endurance. He is also the
president and CEO of Stone Aerospace, the engineering company that
designed and built the Endurance vehicle.
Dr. John Priscu is a
Co-Investigator from the University of Montana. He
has been studying the lakes in the Antarctic Dry Valleys for over 20
years.
Bart Hogan is a mechanical
engineer for Stone Aerospace.
Dr. Kristof Richmond is a
programmer for Stone Aerospace, focusing on
navigation.
Shilpa Gulati is a programmer
for Stone Aerospace, focusing on the
system executive and machine vision. She is also a PhD student at
University of Texas, Austin.
Chris Flesher is the vehicle
manager, programmer, and electronics
technician for Stone Aerospace. He is a Masters student at UT Austin.
Rachel Middleton Price is an
electronics
technician for Stone Aerospace.
Vickie Siegel is chief vehicle
technician and logistics manager for Stone Aerospace.
Maciek Obryk is a graduate
student at the University of Illinois at Chicago.
Emma Steger is the Lake
Bonney camp manager.