



Lake Bonney Expedition 2009
The second deployment has been successfully completed.
Full details are available at the
Stone Aerospace ENDURANCE 2009 Blog.
You can learn more about current events from Kristof Richmond at
Kristof's blog
and from Emma Steger at Emma's
blog and from Shilpa Gulati at
Shilpa's blog.

Maciek removes one of 17 mylar thermal blankets from the bot garage siding.

The interior, final shell of the bot garage presses against the tube frame in the up-valley wind.

With the superstructure of the bot garage stripped away and all of the science gear packed in cargo crates and sling loads, ENDURANCE stands alone in its own ECW gear, awaiting pickup.

The art of Antarctic Dry Valley conservation: Vickie, Rachel, Maciek, and Jim cart off seven 5-gallon bio-hazard drums of human waste from the yellow pyramidal Scott tent outhouse by the bot garage. The orange 55 gallon drums contain six weeks of urine. Nothing is left behind.

Packing out: personal helo bags (orange) stack up outside the ELB Jamesway on December 5th. Each person gets two such bags. Science cargo goes separate.

The final hike to the helo pad for the ride back to McMurdo. Six people in full ECW gear with their personal belongings fit into the B212.
Saturday
December 5, 2009
At 7am Peter Doran came around to every tent in East Lake Bonney camp and woke the crew up one by one. Despite the cloud cap the word from McMurdo was that the helos were flying, and there was much to do today. Everyone crash packed their tent, sleeping bags, pads, personal clothes, and ECW by 8am and had lugged them down to a growing pile below the helipad just east of the Jamesway. At 8:10am Vickie, Rachel, Bill, Maciek, and Jim headed for the bot garage to join the carpentry crew for the dismantling of the now-empty lab structure. Kristof, Chris, Peter, and Shilpa were scheduled for the first helo flight back to McMurdo and stayed at ELB to pack.
By noon the tarps, insulation blankets and framing (tubes) were all down and boxed. We used a rolling scaffold with two persons on top and two ladders on the mid-sides. We had to move the bot (on its sled) to the side of the platform to allow passage of the scaffold; otherwise it all went well. The carp team remained on site handling the preparation of sling loads for several more helo lifts expected in the afternoon. For our team, however, it was time to quickly retreat to ELB camp and make one last pass through the Jamesway to ensure everything was packed. It was time to go meet our science cargo back in McMurdo.
A B-212 helo dropped in on ELB camp around 2:20pm. We had already hauled all our bags up and had them sitting beneath the helo pad so it was a matter of putting on ECW jackets and white boots and running up. They handed out helmets and we crammed six of us in the back along with all our orange bags (sleeping kits had been left under the helo pad for later pickup).
The housing office handed out keys when we arrived. Some people fared worse than others in the lottery: Kristof, Chris, Maciek, and Jim got bunks in the infamous Hotel California. Emma and Shilpa, on the other hand, got their own rooms in Building 203. So ended the 2009 field season. For some of, however, it would be another week in McMurdo, packing equipment for retro to CONUS.

Vickie, Emma, and Rachel disassemble the bot instruments for safe packing.

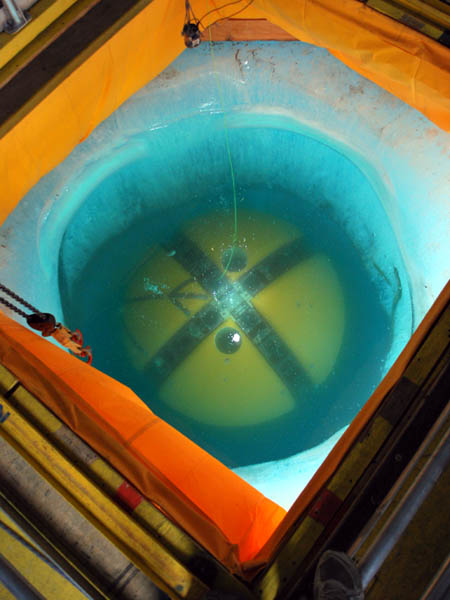
Looking like a quartet of killer whales breaching the surface for breath, the bot syntactic sits on a sea of frozen ice on West Lake Bonney, awaiting closure for helo pickup.

Chris, Kristof, and Shilpa re-load 2 kilometers of fiber optic data comm line for retro to CONUS.

Bell 212 Helo "Oh-Eight-Hotel" carries a half ton of diving gear out in one lift.

Chris (left) and Kristof make their way up the final basalt, dark-rock summit pyramid on the Matterhorn. Far below is the Matterhorn Glacier which, itself, is close to 800 meters above East Lake Bonney, far, far below.

A forever view looking north into the Asgard Range from near the summit of the Matterhorn.

A bizarre wind-eroded basalt pillar ventifact some 200 meters below the summit of the Matterhorn gives the appearance of a host of spirit faces scrutinizing the arrival of the climbing team. The angular distortion is deceiving - the pillar is actually vertical and the boulder slope is close to 45-degrees to the vertical.
Friday
December 4, 2009
The crew was up and at the lab at 8am and facing the substantial task of breaking everything down that had been set up for the past six weeks and getting it into the appropriate shipping containers, "Triwalls," and readied to be lashed into cargo nets for pick up by the helo fleet that would now be visiting us like mosquitos on a hot summer evening.
By 4pm the first half of the team was heading back to ELB camp to begin packing up personal things in preparation for tomorrow's expected retro to McMurdo. Along the way to ELB a team of four from the carpentry shop led by Chad McNaughton passed on their way to begin preparation of helo sling loads for the cargo boxes that our team had assembled. Several loads left for McMurdo today including all of our diving gear and a compressor in one sling under a B212. It was like Anti-Cargo-Cult mysticism ... You laid out the loads on the ice and they disappeared before sunset. It was always impressive to watch when the McMurdo helo fleet kicked in. And to them we owe a debt of gratitude for their awesome service both in 2008 and 2009.
There was one final piece of unfinished business for some of us. After having stared at the looming Matterhorn peak (see November 5, 6, and 22nd logs), 1860 vertical meters above our camp, everyday for 6 weeks and with precious few hours left this year before departure, Kristof, Chris, and Bill set off to climb it at 5pm. The weather was stark clear and the wind had died. Despite the good weather the three each carried ECW gear, food, water, and radios. Six hours later they reached a point about 200 vertical meters below the summit and found the route too steep with snow and ice to safely continue without technical ice gear. The view, from a vertical mile above camp, well above the southern Kukri Hills that flanked Taylor Valley, was one that would last in memory forever. The absolute pristine beauty, the stark geometry of rock and ice, of banded exposed geology, and the vista that went for more than a hundred miles, was stunning. We could see over the Kukri Hills to the south and beyond the Asgard Range to the north. McMurdo Sound was visible to the east. The descent was swift and sure and the team was back by 2am, in time to celebrate the return of Maciek Obryk and Jim Olech to ELB. They would help us take down the bot garage in the morning.
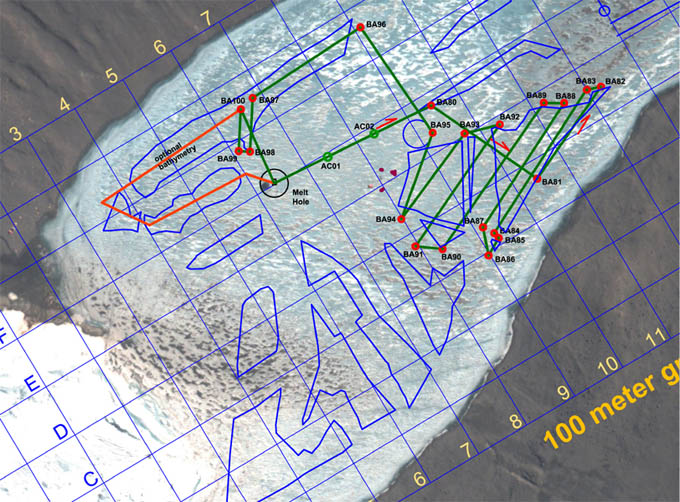
The complex December 3, 2009 bathymetry mission had as its initial objective the completion of lake floor mapping southeast of the LTER limno cables (shown as a cluster of four maroon spots south of AC02). It then proceeded north to fill in gaps in the November 30th mapping zone, and finally ended with automated sonde tests east of the melt hole.

Chris (right) continues work on the enhanced sensor-fusion automated-sonde code while Shilpa and Kristof monitor today's mission.
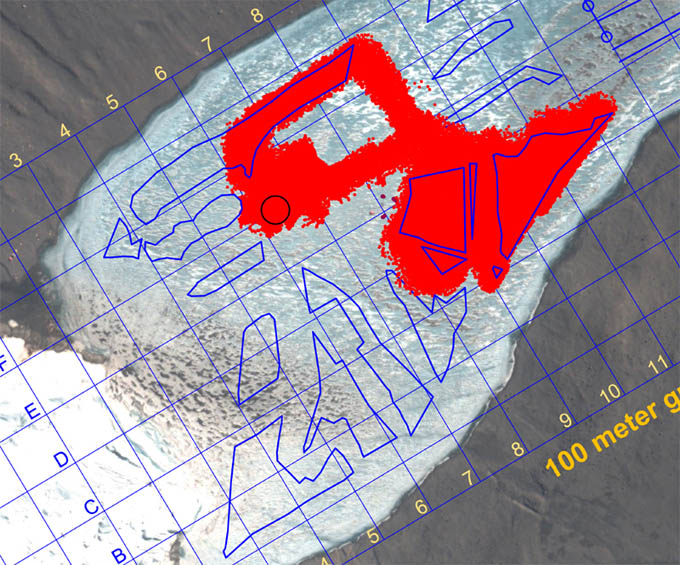
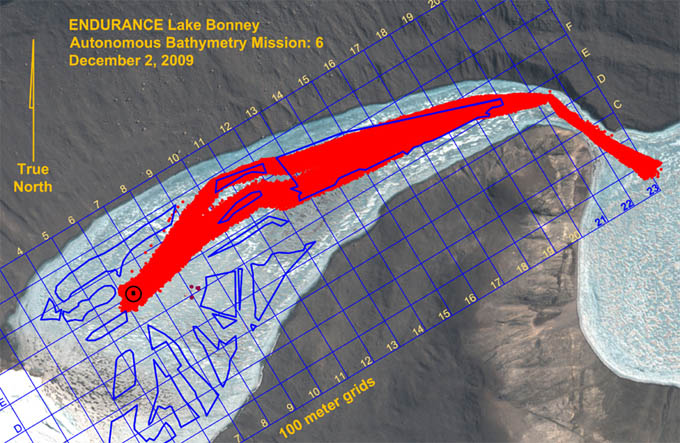
Results of today's supervised autonomous bathymetry mission. Complete coverage (and more) was achieved in all target zones (shown by the blue polygons).
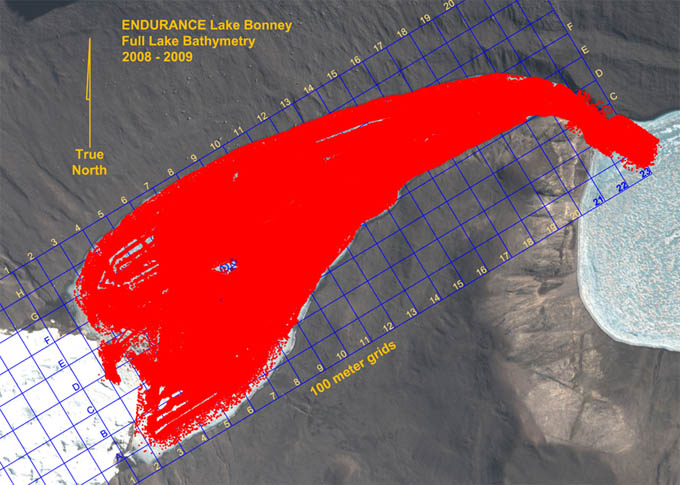
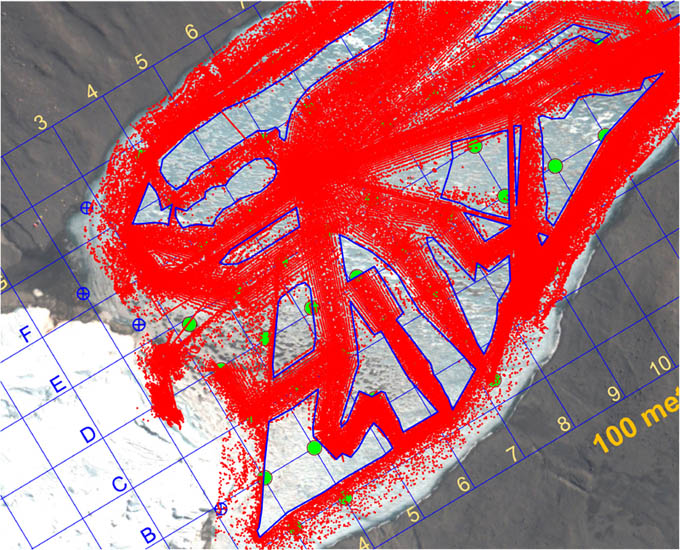
The composite result of all bathymetric data acquired in 2008 and 2009 by ENDURANCE. The entirety of West Lake Bonney is mapped along with the Bonney Riegel Narrows (where Scott's party passed in 1903) as well as several hundred meters out into East Lake Bonney. There are other data, from obstacle avoidance sonar as well as glacial mapping from 2008 that are not shown here that fill in remaining sections up to the face of Taylor glacier. In all the map represents several hundred million measurements and by orders of magnitude is the most detailed map of any sub-glacial lake currently known.
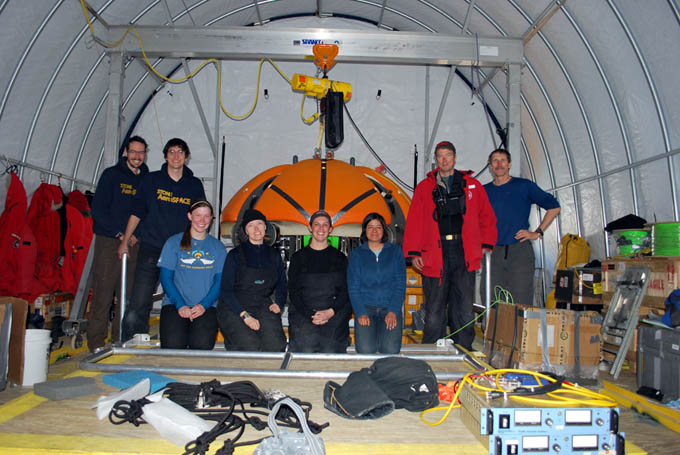
Left to Right: Kristof Richmond, Chris Flesher, Emma Steger, Vickie Siegel, Rachel Price, Shilpa Gulati, Peter Doran, and Bill Stone.
Thursday
December 3, 2009
Mission Objective: Limno "no fly" zone bathymetry cleanup - final mission 2009; auxiliary navigation experiments; autonomous automated sonde mission down deep axis of lake if energy remains.
After a considerable amount of discussion and planning we sought to wrap up all remaining data collection and vehicle control experiments for 2009 in one final mission. The primary objective was to fill in the bathymetry map southeast of the LTER limnological cables. For this we would have to employ the diversion pole for the 4th time. The mission profile was complex and contorted and we hoped to fill in some of the northwest gaps left over from the November 30th mission. Last, we planned to test the finalized sensor-fusion Sonde cast system on a short mission down the deep axis of the lake through waypoints AC01 and AC02.
The final mission was uploaded at 11:15am and the vehicle as in the water and neutrally ballasted 21 minutes later. The vehicle subsequently failed the ice-picking test at 11:48am and we brought it back and removed 1 kg of ballast, this time taking the precautionary measure of locking the nav solution prior to ascent through the melt hole. This procedure subsequently proved effective. The mission proceeded smoothly and it was supervised, although not interfered with, at mission control throughout the entire run.
The issue of the changing ballast requirements has remained one of the curious mysteries of working in Lake Bonney. From day to day - and even during the conduct of a mission - and with no physical changes to the vehicle from one mission to the next, the buoyancy has been seen to vary as much as 10 kg. Originally this was thought to be a result of the "microbubble" phenomenon discovered here in 2008. There, we believed that super-saturated gas dissolved in the water was allowed to leave solution due to the pressure drop associated locally with the vehicle's thruster props. It would frequently adhere to the vehicle skin as white fuzz. This, however, had the effect of increasing the buoyancy of the vehicle, which altogether was not a problem for Sonde missions. The issue of increasing negative buoyancy following an otherwise positively buoyant state in the melt hole could potentially be explained by cold shrinkage of electronics housing and flotation or possibly by trapped bubbles compressing with greater depth. But great efforts were undertaken at the start of each mission to "burp" the vehicle of any trapped gas. So this issue remains for consideration for future sub-glacial autonomous systems operations.
At 4pm the bot detected a very large boulder on the north shore of the lake, on the order of 10 meters in diameter. At 4:35pm Mission Control interceded in the mission in a planned test of one of the auxiliary navigation systems (the iUSBL). In this test Mission Control induced a failure state in which the dead-reckoning navigation system went off-line. The vehicle control system picked up on this and successfully navigated back to the melt hole on the iUSBL system for the remaining 150 meters of this first part of the mission. By 4:44 pm we initiated the second half of the mission: an autonomous sonde run east of the lab. With no intervention the bot conducted fully automated sonde casts at F6, AC03, and AC04 (parallel to, but offset to the north of AC01 and AC02). Also, given that a large rock had been detected in this zone on the outbound journey to the limno zone we were able to use this information for further fine tuning of the roll calibration on the imaging sensors. Total mission length for today, not including the final sonde run, was 3,318 meters with 4.3 hours of under-ice time. With this mission complete the 3D geometry of sub-surface West Lake Bonney was complete (see figure). As of 6pm today, with the bot safely back, all mission objectives set forth for the ENDURANCE project had been met and in most cases exceeded by substantial margins.
By 6:21pm the moon pool cover had been closed for the final time and a group photo of Team ENDURANCE 2009 was taken. The rails were disassembled and taken outside. The Sonde was removed and packed. By 8:04pm the four syntactic flotation quads were in their yellow shipping transport cases and moved 50 meters west of the bot garage, within helo pickup range. All of the battery stacks (5 of them) were packed and stacked. At 8:30pm the 10 kW diesel base generator was powered down for the final time and we drove back to the Jamesway at ELB. Just two days of packing and break down remain in Taylor valley.
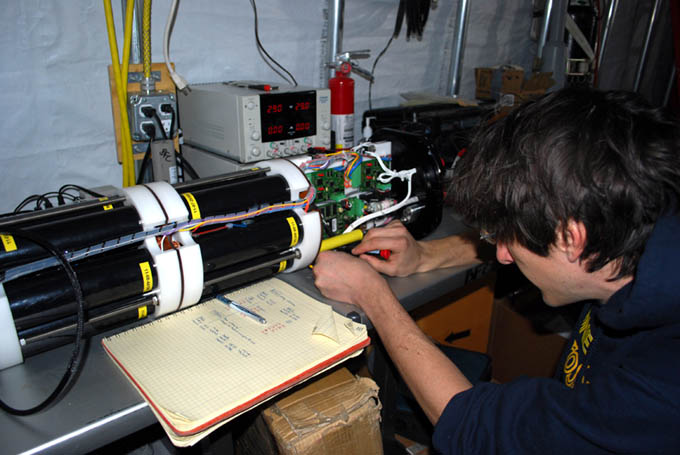
Chris tests the stack balances in the batteries before they are re-loaded into the vehicle for the December 2, 2009 mission to the Bonney Riegel narrows
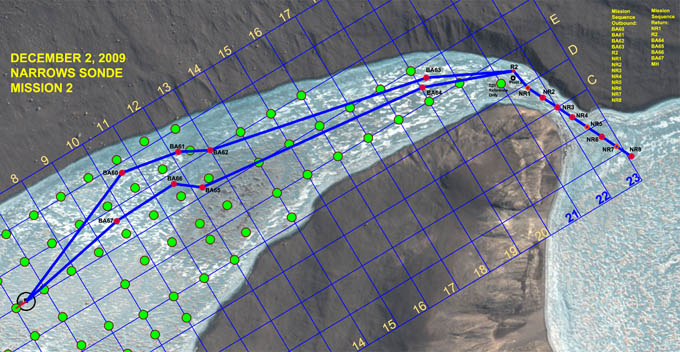
The mission plan was similar to the November 18th run with the significant changes in vehicle path at both the beginning and end to accommodate filling in missing gaps in the bathymetry data. Specifically the vehicle was targeted north to BA60 to BA63 on the outbound mission and to BA64 to BA67 on the return. The sonde casts through the narrows were identical to the prior mission.
Vickie tracks the bot in real-time with RTK-GPS during the December 2, 2009 mission through the Bonney Riegel narrows.

The full picture of the narrows with Bill Stone standing directly above where Scott's party stood in 1903 (with 16.2 meters in water level rise). See the November 18th, 2009 log entry for a cross section plot at this location.

Vickie Siegel acquires the last of the GPS fixes for the sonde cast waypoints. With an 80 minute transit time for the bot to return from the pivot point at R2 to the melt hole, the ice tracking team retrieved the white pivot tube (seen attached to the ATV), collected the remaining flag markers, and their coordinates.
Lake bottom bathymetry was paved in and on target, mopping up the last of the gaps in the eastern half of West Lake Bonney. Only the area southeast of the limnological experiment zone remained to be scanned.
Wednesday
December 2, 2009
Mission Objective: Narrows sonde mission temporal duplicate run (to capture the effects on water chemistry through the connecting sill between East and West Lake Bonney due to melt water runoff since the last run through the narrows on November 18th).
The crew was up at 6:30am working on data reduction and blogs and at the bot lab by 9:30am. At 10am Kristof delivered to Bill the previous mission's ice picking pose coordinates. These were re-plotted in the mission planner to obtain the true location for NR7. This particular location had been moved 50 meters further into East Lake Bonney at John Priscu's request on the original November 18th narrows mission. Since we now had GPS locations for the true points, these were used to establish the target waypoints for today. The batteries completed charging and were re-installed into the vehicle at 11:23am. By 12:13pm the bot was back together and on top-off charging. The IMU was aligning and the mission plan was uploaded. At 12:40pm the bot was underway to the narrows following an initial failed attempt at ice-picking adjacent the melt hole. Ice picking was one of our final checks before releasing the vehicle on a mission. In this case the vehicle was too heavy and would not float up under the ice - a requirement on all our Sonde missions for conservation of energy while conducting the sonde cast. We commanded the vehicle back up the hole, removed a kilogram of lead and sent it back down. This time it passed the ice pick test and we sent it on its way.
At 2pm the bot reached the pivot target R2 just north of the Narrows. The navigation was off by 2.5 meters and Bill and Vickie on the ice tracking team reported this via radio to mission control. This was not enough error to cause any problems with the fiber diversion system (in place at waypoint "Pivot 2") but by the time it reached the first scheduled sonde cast waypoint, NR2, the error had grown to 4.5 meters. The ice tracking team re-vectored the bot to the waypoint and the GPS coordinates were uploaded to the navigation solution, essentially re-initializing it to those known coordinates. The mission proceeded on schedule and on target from that point forward. By 6:15pm the bot was a half kilometer from the melt hole, having acquired all of the sonde casts at NR1 through NR8 and carrying a battery reserve of 32%. By 6:23pm it was 150m from base with 28% reserve. At 6:40pm the bot found the melt hole and automatically began its ascent. The auto-docking sequence was halted and the vehicle was put into station keeping mode while a new set of instructions relating to automated sonde cast testing was uploaded. The vehicle was then sent back down and retargeted to F6 where a fully-automated sonde cast was successfully accomplished using the new sensor fusion code. A full test of this new system was scheduled to take place at the conclusion of tomorrow's final bathymetry mission. By 7:18pm the bot was back at the lab.
In a post-mission debriefing we discussed the navigation error at NR2. Kristof hypothesized that it was due to the fact that the bot failed the first test for ice picking at the start of the mission. It was brought back and some lead was pulled off. Normally, once the navigation solution was acquired and the bot launched the vehicle moved in a smooth succession with all sensors acquiring data. Aside from eating up power (which proved to not be a problem) the apparent problem had been that the navigation solution had been updated without the benefit of several key sensors - which were shielded by the melt hole. Without those sensors in the loop, the position estimate was coming only from doubly-integrated accelerometer data, which is known to drift over time even with the very high grade accelerometers installed in ENDURANCE. This was enough to inject both a positional error of several meters and a slight angular misalignment at the re-start of the mission and this extended to NR2 where we reset the solution to the absolute coordinates there (acquired by GPS). With the main nav sensors operating the solution maintained lock for the remainder of the mission. The total under-ice run length, not counting the excursion to F6, came to 3,982 m today with an under-ice mission duration of 5.6 hours. The sonde cast data were excellent and formed a complete data set with which to compare to the set acquired three weeks earlier.

Marianne Okal sets up for another LADAR scan at Taylor Glacier. The far tripod, with its white sphere, is part of the geo-registration system. Three of these spheres, whose GPS position is known, are positioned within each scan frame and the laser ranges to these spheres form a unique registration solution to the position and orientation of the LADAR. Like the underwater 3D data, we use UTM (Easting, Northing, and Elevation, in meters) as the reference coordinate system.
Bathymetry Mission 5, on December 1, 2009 was another "gerrymandered" convoluted route to fill in gaps in the lake bottom topography left by prior missions. The total mission length was 3,352 meters with an under-ice transit time of 3.6 hours (total of 4.6 hours in the water).
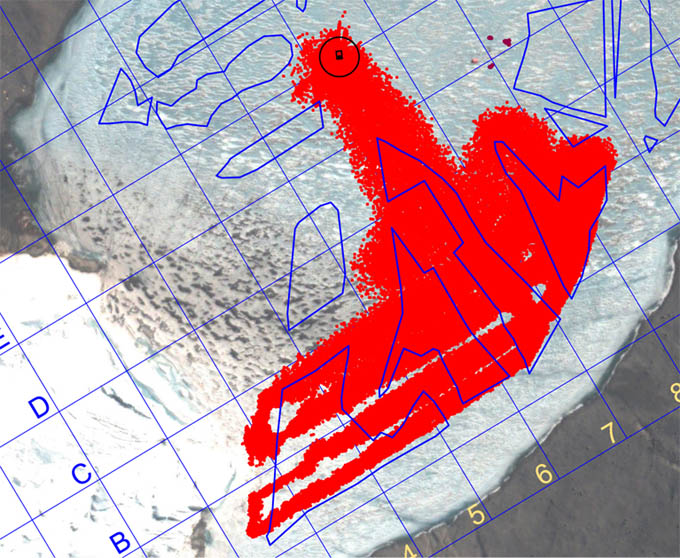
Supervised autonomy (with mission control actively modifying the range gating and gain on the multi-beam scanner) resulted in a nearly 100% fill factor in the targeted gap regions of the map. Extreme under-keep shallows prevented absolute coverage in the far western section of the map. In some places less than 2 meters of clearance under the vehicle existed - the lake shallows up considerably west of the A4-C4 line.
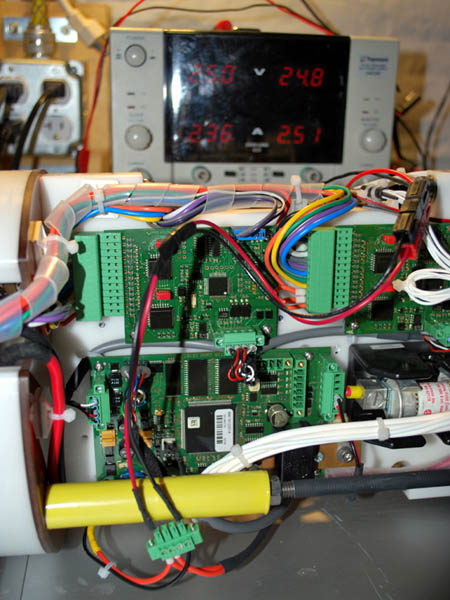
Going for maximum performance for the December 2 Narrows mission, the individual battery stacks are manually balanced prior to full charging.
Tuesday
December 1, 2009
Mission Objective: Southwest quadrant bathymetry cleanup.
The main portion of the team was up at 8:30am and off to the bot garage. The late team (who planned yesterday's mission at 3am) of Chris and Bill slept in till 10:30am then came to the lab at 11:30am along with Marianne Okal from UNAVCO. Marianne would be running a series of LADAR scans of Taylor Glacier and the Bonney Riegel narrows to complement the underwater 3D map. Together these would form a permanent 3D temporal record of the geo-spatial topography of these features at this point in time.
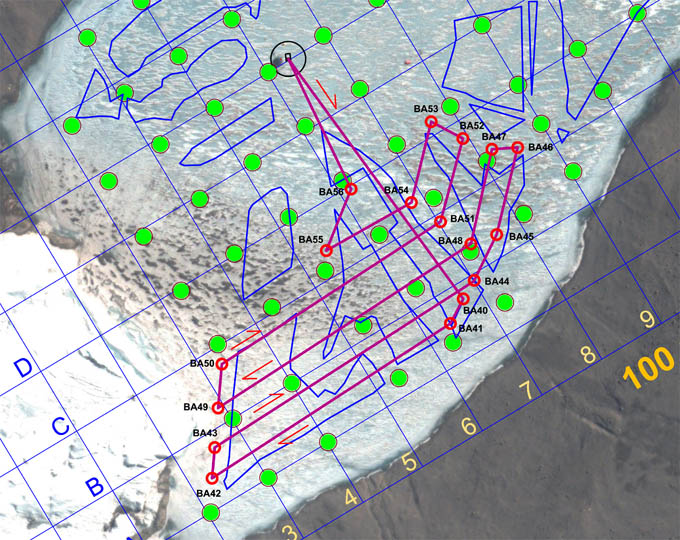
At noon there was an exclamation from Shilpa at Mission Control that the internet was back up ... following another 7-day absence. There was a momentary stuttering halt to the mission checklist while everyone dashed to check their email. By 1pm all of the system checks had been cleared and the bot was underway on Bathymetry Mission #5. The mission plan (see figure) was as similarly complicated as the previous mop up missions, with the effort being to fill in the gaps from the previous surveys. In this regard it is worth pointing out that there was no apriori "most-efficient" method currently developed (by us or anyone else) for bathymetry mapping of an unexplored sub-glacial lake. The approach we took in 2008 was that the Sonde chemistry casts took highest priority; the initial scanning and exploration of the underwater entry of Taylor glacier into West Lake Bonney second priority; and, finally, to fill in bathymetry and improve the extremely limited knowledge of the lake bottom topography (obtained by the few wire drops that had been performed before 2008) as a "target of opportunity". We took the philosophy in 2008 that we would mount the multi-beam imager in down-look mode and take what we could get in the form of bathymetry while otherwise getting the Sonde data. Fortuitously, we now knew from the successfully completed 2008 sonde missions what the topography looked like and were now able to go about a concerted program to fill in the gaps. The approaches we have selected to the November 30, December 1, 2, 3, and 4 missions have sought to fill in the gaps with the least number of missions. These have resulted in the "gerrymandered" shape to some missions, today's included.
By 2pm the vehicle was at waypoint BA47. There was no surface tracking this time although we did keep the data link up. The only human input on the mission was to adjust the multi-beam range and gain settings to gain the maximum low-noise bathymetry data. This "supervised autonomy" approach worked well (as it has in the past) and the swath widths (and fill factor in the targeted regions) were maximized throughout the mission. By 4:12pm the vehicle was back at the melt hole, locked on, and auto-surfaced. We then submerged again and returned to F6 for further testing of the DVL-assisted auto-sonde drop code that Chris had developed. By 6:16pm the bot was back on charge on its carrier sled in the lab and the data were being downloaded. Bill completed the mission plan for December 2 and this was distributed for comment. Since this would again push the system to its limits (through the Bonney Riegel narrows) efforts were undertaken to balance the battery stacks and achieve maximum accessible charge. By 8:06pm the batteries were out of the vehicle and being manually balanced; by 8:37 pm the imbalances had been corrected and the full stacks were put on a 3.25 amp charge for the night. The canisters were left open for a final balance in the morning.

Kristof (left), Vickie, Rachel, Shilpa, and Chris go over the November 30th mission plan.
Prior to November 30, 2009 this was the plan extent of the bathymetry that has been acquired for West Lake Bonney and represents a composite of all 2008 and 2009 missions to date that collected bottom topography information. The blue polygon-enclosed areas represent gaps in the data set. Our goal was to fill these in to the maximum extent and leave no gap greater than 25 meters.
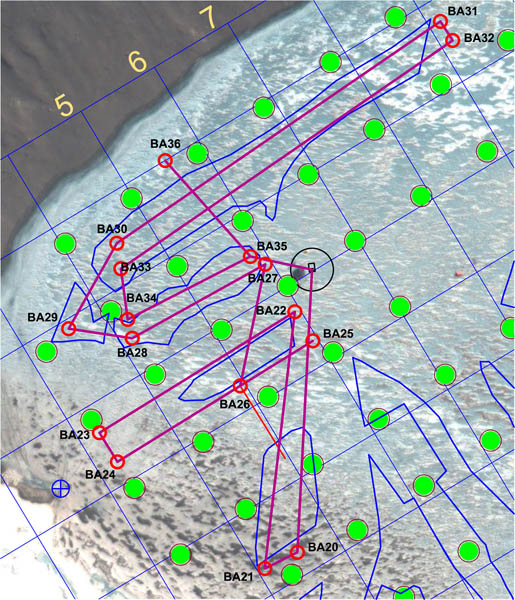
The gerrymandered mission of November 30 was meant to sweep out all of the blue polygon gap areas shown and, as well, to conduct calibration tests that would acquire data needed to align the critical mapping sensors in yaw, pitch, and roll relative to the vehicle coordinate system. The "patch" test used segments BA22-BA23 and BA24-BA25; the "crossing" test used segment BA35-BA36 in conjunction with BA30-BA31 and BA32-BA33.

Vickie breaks the data link to the vehicle for the second day in a row. From this point forward the vehicle was fully autonomous.
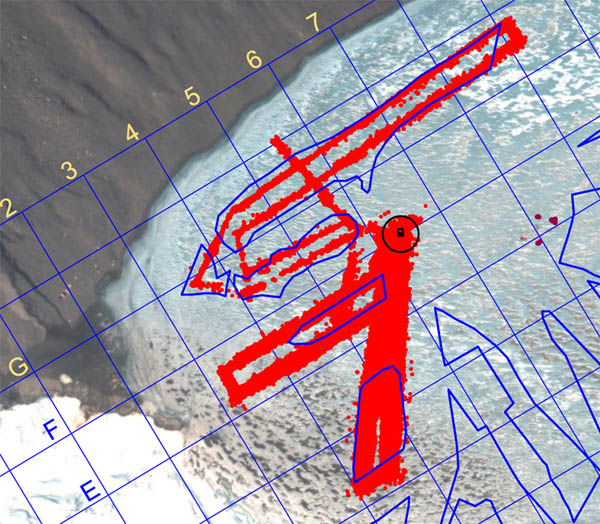
Bathymetry fill results from the November 30 fully autonomous mission. Nearly complete fill was achieved at the center of the lake; less coverage (but still acceptable) was obtained in the shallows towards the northwest shore, largely because of a reduction in the acoustic reflectance of the material in that area.

Shilpa retrieves the iUSBL transponder prior to arrival of the bot. Since the data fiber was disconnected, we tracked the bot position using the through-ice emergency beacon. Kristof, who was on duty, radioed the message to Shilpa who pulled the beacon just as the bot arrived under the melt hole.

Returning home, image 1 of 3: the bot crosses the melt hole at a depth of 5 meters.
Returning home, image 2 of 3: the bot locks onto the central guide light beam.
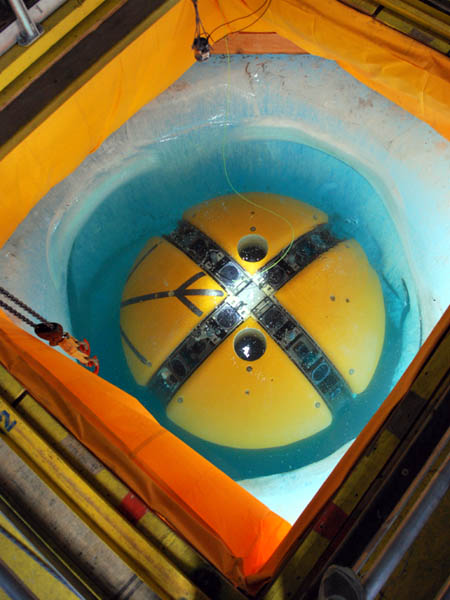
Returning home, image 3 of 3: the bot surfaces, still locked onto the central beam.
Monday
November 30, 2009
Mission Objective: clean up bathymetry gaps in the northwest quadrant of West Lake Bonney. Conduct instrument alignment patch and crossing tests.
The team was up at 9am (less than 6 hours sleep for Chris and Bill) and back at the mission planning task. At 10am Kristof delivered decimated data sets for the Narrows and the southwest quadrant shore scans. These were imported into the mission planner and work continued until 2pm. Bathymetry Mission 4 was a complicated, "gerrymandered" trajectory designed to accomplish the dual tasks of filling in the gaps in the 2008 bathymetry data in the northwest quadrant and, as well, to acquire data that would be used to calibrate local yaw, pitch, and roll for various critical mapping instruments. The main multi-beam imaging system was moved from its forward-looking mapping and obstacle avoidance position to a down look orientation for swath bathymetry mapping.
By 2:40pm the bot was down hole and on its way. As soon as it cleared the positive buoyancy test Vickie disconnected the fiber and the next fully autonomous mission was underway. Kristof took a turn out on the ice with tracking the bot in real-time. Five hours later, having run the maze-like mission, the bot found the melt hole, locked onto the light beam and surfaced on its own. The entire mission had proceeded flawlessly with a run time of 3.8 hours underwater (4.8 hours total in-water mission time). The total underwater traverse was 3,481 meters. We had, using the mission planner, conservatively predicted 27% power reserves at this point; the actual reserve was 35% at surfacing.
Given that we still had substantial power remaining, the vehicle was re-ballasted for neutral running at 5 meters and sent to station F6. A series of cast tests were conducted there (fully automated drops) using a simple control filter comprised of the Profiler encoder, the Sonde altimeter, and the Doppler vertical ranging. We will later include the following additional auxiliary sensed data to the control filter: bot depth sensors (meters); sonde depth sensor (meters); nadir obstacle avoidance sonar (meters to bottom); and central multi-beam range (meters to bottom).
At 8:54pm the bot returned to the melt hole, locked onto the guidance light beam and rose up the hole. The bathymetry data were downloaded and subsequently plotted later in the evening. These revealed some curious behavior in the data. In the central portion of the lake we obtained nearly 100% of the intended topographic fill content we were seeking. However, in the shallows along the northwest shore the acoustic reflectance characteristics of the lake bottom were significantly different, and the valid range returns from the multi-beam comprised a narrower swath than was originally expected. The instrument in question had software selectable range gating and signal gain adjustments, but these are frequently sensitive and too much gain, which would have led to a wider return swath, would have resulted in noisier, less accurate measurements unless the range gates were appropriately set. This process, currently, is something best done by a human while observing the data feedback. It would have been caught immediately had this been a human-supervised autonomous mission, as we had until now been running. It pointed to the limitations of a robotic system in a purely autonomous setting. Silicon intelligence only responds to that which it is programmed to perceive plus a few simple behaviors driven by direct sensed and derivative data.
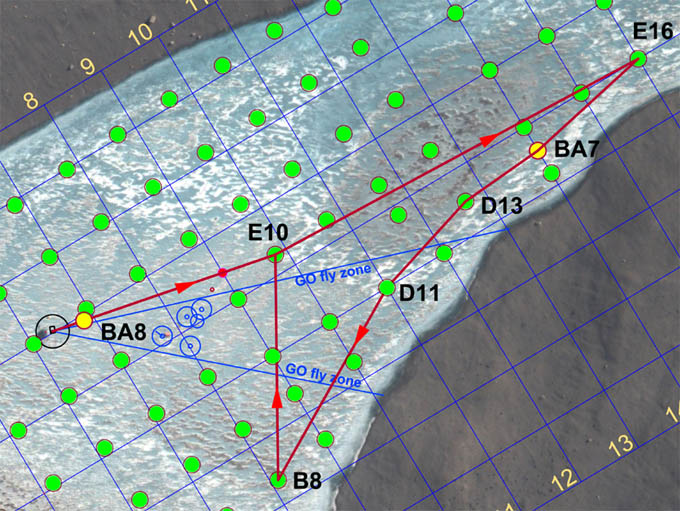
The mission plan for November 29th, 2009 was fairly straight forward - a bathymetric side-look scanning run at 80 meters standoff range down the southeast edge of the lake to stitch together the previous two lake edge scans. But it involved moving through the limnological LTER zone. For security we left the data fiber attached to the vehicle (but not connected to mission control), so we again used the pivot point (tube) west of E10 to ward the fiber away from the limno cables.

Vickie prepares to free the bot.

The deed is done and ENDURANCE is running fully autonomously, without supervision from mission control.
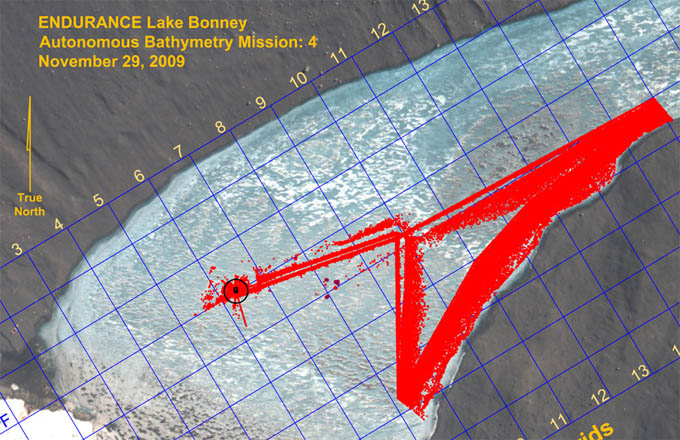
Results of the November 29th lake edge bathymetry mission. Only 1/100th of the points acquired are plotted here.
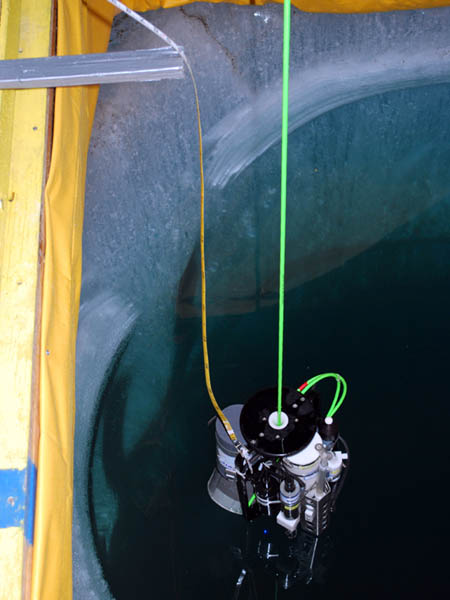
With the bot suspended out of the water, the Sonde pod is lowered to lake bottom with a metric tape trailing behind. This external reference provided an absolute scale against which to calibrate several onboard sensors including the drum encoder for the spooler, the pressure sensors on the Sonde, and the down-look altimeter on the Sonde. These would later be fused in a new filter for enhanced autonomous bathymetry tests.
Sunday
November 29, 2009
Mission Objective: complete the final section of lake edge scanning with an autonomous, fiber-disconnected mission (we will retain the physical fiber tether but the link will be broken at the bot house). Subsequently, perform several autonomous sonde casts at F6 to test new code that has been developed since the November 21 and 23 instrument pod grounding incidents; then a calibration of the sonde encoder.
The crew was up and eating breakfast at the Jamesway by 7:30am. A full team meeting was held at 9am to plan out the final 2009 missions. Most of these focused on the completion of the lake bathymetry and a notable re-run of the Bonney Riegel narrows mission - not because of data error but in order to gain a second, temporal, data set that would show how the chemistry measurements changed at the shallow sill separating East from West Lake Bonney (WLB) as a result of the now increasing melt runoff from Taylor glacier. The team agreed to the following remaining missions:
- Nov 30: tether-disconnected (at bot house) bathymetry, northwest quadrant WLB
- Dec 1: tether-disconnected (at bot house) bathymetry, southwest 1/3 of WLB
- Dec 2: Narrows sonde re-run, with data fiber and with manually supervised sonde drops
- Dec 3: Narrows sonde re-run (if necessary), tether-disconnected (at bot house) or mop-up bathymetry southeast quadrant behind the limno cables
- Dec 4: pack up
The entire crew was on the way to the Bot Garage at 9:45am. By 12:30pm the mission was underway and ice-picking positive buoyancy checks At 12:35pm Vickie disconnected the data fiber. The bot was on its own. In order to keep some measure of what was happening Kristof and Bill proceeded to follow the vehicle using the thru-ice tracking system. They proceeded directly to the E16 sonde cast location (using GPS to re-locate it since the flags had already been retrieved after the surface fix was achieved). The vehicle proceeded smoothly down the southeast shore to B8, which was well behind the prior limno "no fly" zone. We were again using the PVC pivot tube (small red circle about 140 meters southwest of E10 - see mission plan figure). All proceeded according to the program and at 3:30pm the vehicle returned to the melt hole with sub-meter navigation error.
Chris subsequently ran a few automated sonde casts at F6 to test new code that integrated several auxiliary sonar systems to augment the altimeter on the Sonde instrument pod. The remainder of the time until 8pm was used to calibrate the Sonde depth sensor. Kristof and Shilpa read off the precise descent distance (using a metric fiberglass tape) while Chris stepped the Sonde downward via software commands. Bill recorded the encoder ticks and the pressure sensor readings. With these entered into a spreadsheet we were able to develop a very accurate compensation system with which the Sonde altimeter readings, and those of alternative sonar soundings from other instruments, could be correlated. We planned to test this new concept following the December 3 mission.
The planning for the next few day's bathymetry missions meant post-processing all of the prior data (scores of gigabytes, including that from 2008), importing those into the mission planner, and then developing paths to assure we had as close to 100% lake bottom and ice cap topography as possible. Chris wrote code to decimate the bathymetry data while Bill did the mission planning. Both were up past 3am.
Blog entries from previous weeks
can be found below:
November 22 - 28, 2009
November 15 - 21, 2009
November 8 - 14, 2009
November 1 - 7, 2009
October 6 - 31, 2009
Personnel:
Dr. Peter Doran is the
Principal Investigator for the Endurance
project. He has been studying the lakes in the Antarctic Dry Valleys
for 15 years and is a professor at the University of Illinois, Chicago.
Dr. Bill Stone is a
Co-Investigator for Endurance. He is also the
president and CEO of Stone Aerospace, the engineering company that
designed and built the Endurance vehicle.
Dr. John Priscu is a
Co-Investigator from the University of Montana. He
has been studying the lakes in the Antarctic Dry Valleys for over 20
years.
Bart Hogan is a mechanical
engineer for Stone Aerospace.
Dr. Kristof Richmond is a
programmer for Stone Aerospace, focusing on
navigation.
Shilpa Gulati is a programmer
for Stone Aerospace, focusing on the
system executive and machine vision. She is also a PhD student at
University of Texas, Austin.
Chris Flesher is the vehicle
manager, programmer, and electronics
technician for Stone Aerospace. He is a Masters student at UT Austin.
Rachel Middleton Price is an
electronics
technician for Stone Aerospace.
Vickie Siegel is chief vehicle
technician and logistics manager for Stone Aerospace.
Maciek Obryk is a graduate
student at the University of Illinois at Chicago.
Emma Steger is the Lake
Bonney camp manager.